Researchers at Meta’s Artificial Intelligence Research Lab (Facebook) in the US and at the University of Twente’s Neuromechanical Modelling and Engineering Lab in the Netherlands (led by Prof.dr.ir Massimo Sartori), have co-developed the open-source framework MyoSuite, which combines advanced musculoskeletal models with advanced artificial intelligence (AI). The AI-powered digital models in MyoSuite can learn to execute complex movements, and interactions with assistive robots, that would otherwise require long experimentations on real human subjects.
On Monday, May 23rd after 16:00 pm Meta will publish a blog announcing MyoSuite on their Tech@blog.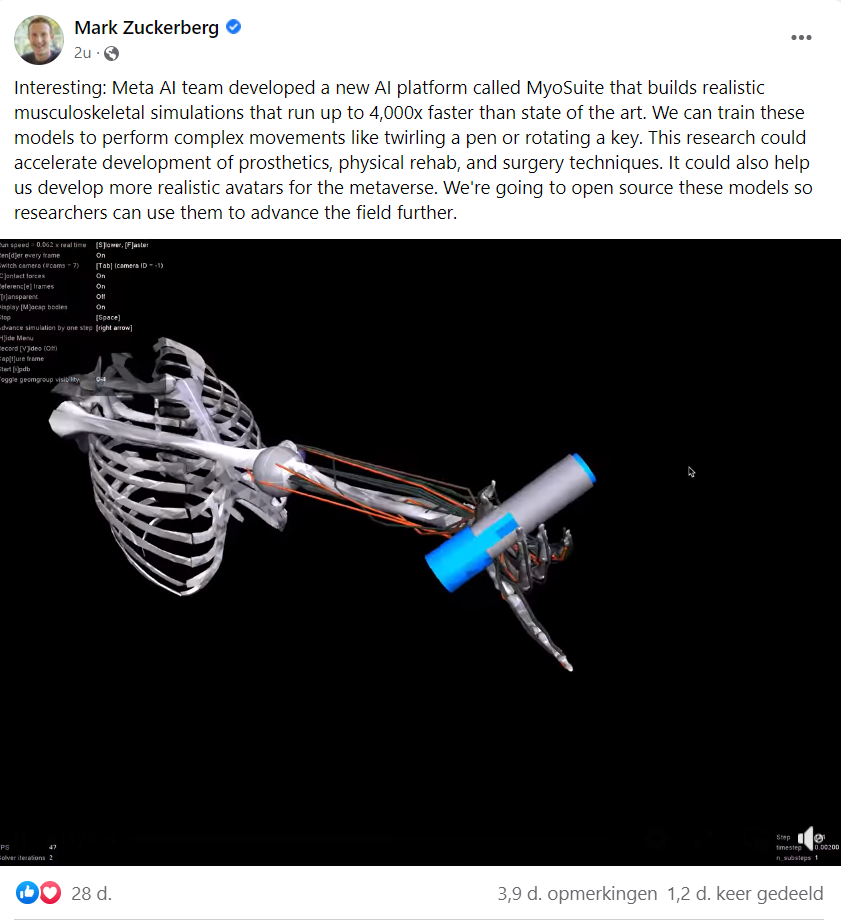
Modeling and simulation are nowadays as important to human health technologies, than they have been for the advancement of modern automotive industry. Prof. Massimo Sartori: “If we could predict the outcome of a robotic therapy beforehand, then we could optimize it for a patient and deliver a truly personalized and cost-effective treatment”.
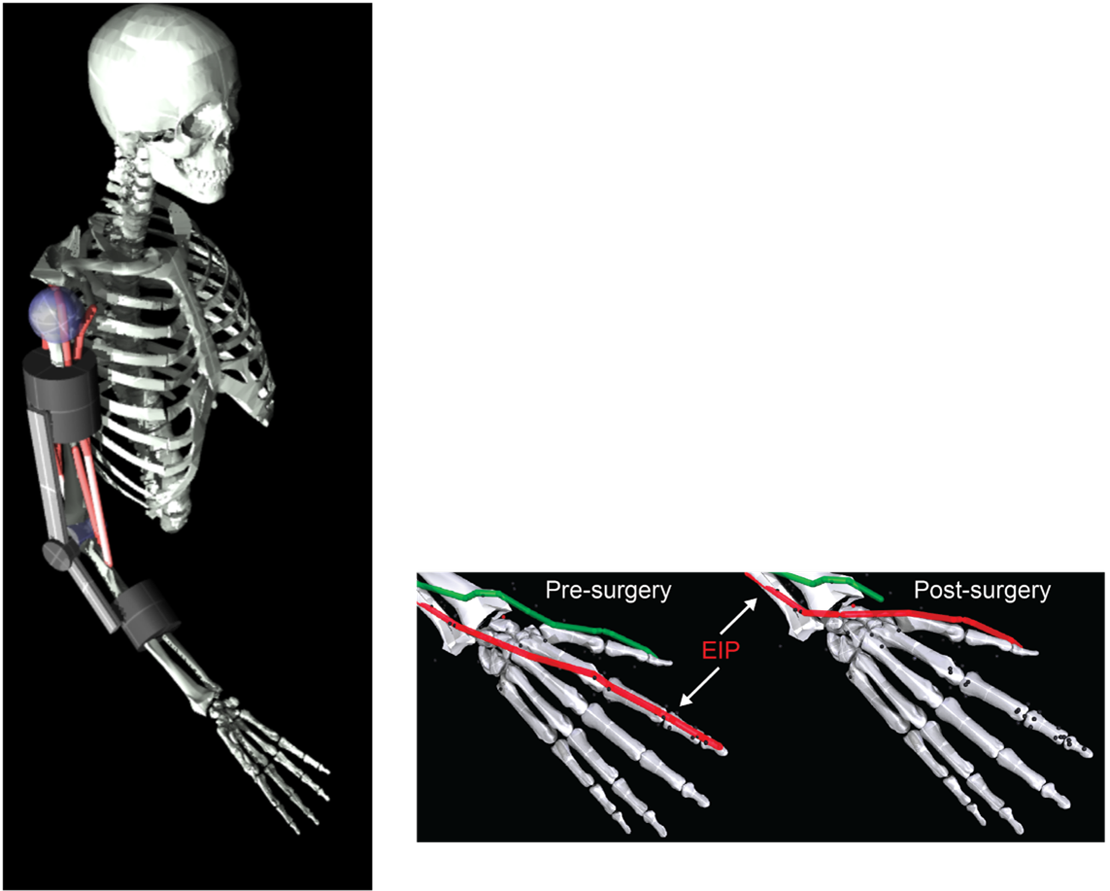
MyoSuite supports the co-simulation of AI-powered musculoskeletal systems physically interacting with assistive robots such as exoskeletons. With MyoSuite you can simulate biological phenomena, e.g., muscle fatigue, muscle sarcopenia, tendon tear and tendon reaffirmation. Moreover, you can simulate how assistive robots could be designed and controlled to restore movement following impairment.

Owing to the physiological correctness of our neural and muscular models, and to the physical realism of our simulations, the AI-powered behaviors are realistic.
MyoSuite can open new avenues in reducing iteration cycles for the design of exoskeleton and robot-aided treatments, which would otherwise need long experimentations with real subjects. "We hope that diverse features supported by our framework will open new opportunities in understanding neuromechanical systems interacting with artificial robotic agents.”
More information
Meta AI Research: Dr. Vikash Kumar and Dr. Vittorio Caggiano
University of Twente, NMEL: Prof. Massimo Sartori, Dr. Huawei Huang, Dr. Guillaume Durandau. https://sites.google.com/view/myosuite/myosuite?authuser=0 and https://pypi.org/project/MyoSuite/
This work was supported in part by the European Union’s Horizon 2020 Research and Innovation Programme as part of the European Research Council (ERC) Starting Grant INTERACT (803035) and in part by the ICT-10 Project SOPHIA (871237).
More recent news
 Thu 18 Dec 2025MedTech sector launches national growth plan
Thu 18 Dec 2025MedTech sector launches national growth plan Tue 16 Dec 2025Two UT projects receive Perspectief grant
Tue 16 Dec 2025Two UT projects receive Perspectief grant Thu 11 Dec 2025Three new NAE Fellows and Young Engineers with UT background
Thu 11 Dec 2025Three new NAE Fellows and Young Engineers with UT background Fri 5 Dec 2025Transforming urban policy for a healthier and safer Enschede (and other cities)
Fri 5 Dec 2025Transforming urban policy for a healthier and safer Enschede (and other cities) Fri 28 Nov 2025UT celebrates 64th Dies: a look at the hospital of the future
Fri 28 Nov 2025UT celebrates 64th Dies: a look at the hospital of the future