The funding falls within the Open Technology Programme (OTP) of the Dutch Research Council (NWO). The research to improve the pessary success rate is being led by Dr Anique Grob (TNW Faculty and Technical Physician at the gynaecology department of ZGT). And the research by the project team of Dr V. Kalpathy Venkiteswaran (ET Faculty) aims to improve the state of the art in robotic surgery and develop tools that can be easily integrated into surgical suites.
Project ‘Fit-up’
Globally, up to half of all women who have had children have some degree of clinical pelvic organ prolapse (POP) and 10–20% are symptomatic causing reduced participation in society and a lower quality of life. Pessary treatment is the first line of care but has a limited success rate of 60%. The project ‘FIT-UP’, functional, individual, tailer-made urogynecological pessary’ aims to improve the pessary success rate by developing a finite element based method, based on knowledge from multi-modality imaging and sensor-based technology. This combination of measurements will be carried out in the TechMed Centre of the UT to ensure an accurate determination of the most suitable shape and type of pessary, for the unique prolapse of each individual patient.
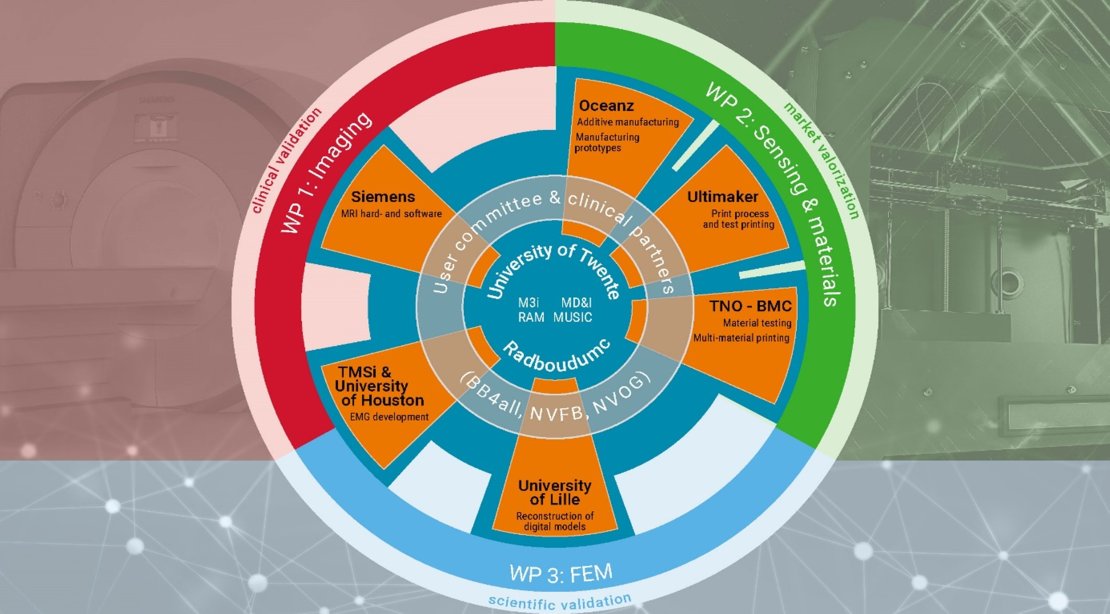
M3i staff member Anique Grob is the main applicant, collaborating with prof Gijs Krijnen from RaM, dr. Frank Simonis from MD&I and prof Chris de Korte from PoF and RadboudUMC. Our team will collaborate with national and international experts in the field to guarantee state-of-the-art solutions. The contribution of both medical imaging (Philips and Siemens) and sensing (TMSi) and 3D printing companies (Oceanz, Ultimaker, TNO Brightlands) is established and will considerably improve the success of valorization. Patient participation and clinical perspectives are covered by means of a close collaboration with BB4all, NVOG and ZGT hospital.
Project ‘FlexSMART’
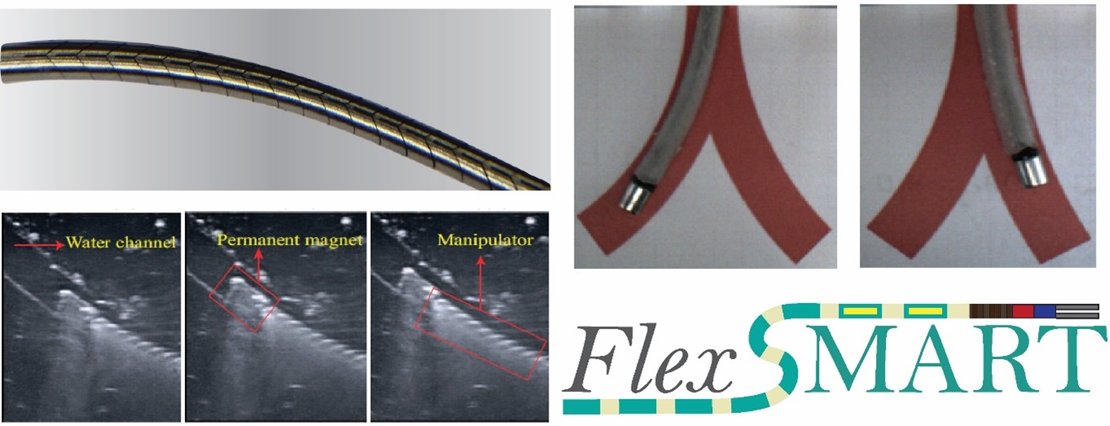
Minimally invasive surgery leads to better health outcomes for patients such as fewer post-surgery complications and faster recovery, which are also beneficial for hospitals and other healthcare stakeholders. Robotic surgery allows clinicians to perform operations with more accuracy and ergonomic advantages. However, there are significant technical bottlenecks that prevent the use of minimally invasive devices and robotic instruments for challenging surgical scenarios. In FlexSMART, miniaturized robotic surgical instruments will be developed that can be wirelessly controlled using magnetic fields. The instruments will have flexible bodies that enable minimally invasive access to surgical sites that are situated deep inside the body. FlexSMART instruments will be embedded with novel ‘smart’ materials that provide increased dexterity and precision during operation. Working with clinicians and industrial partners, the project team of Kalpathy Venkiteswaran (ET Faculty) aim to improve the state of the art in robotic surgery and develop tools that can be easily integrated into surgical suites.
Venkatasubramanian Kalpathy Venkiteswaran (Assistant Professor, Biomechanical Engineering) is the main applicant, with Prof. dr. Sarthak Misra (Chair Surgical Robotics, Biomechanical Engineering, UT) and Prof. dr. Jean-Paul de Vries (Chair, Department of Surgery, University Medical Centre Groningen) as co-applicants. The project is supported by industry partners Jansen Precisie Techniek (Borculo) and FBGS (Geel, Belgium).
information
NWO's Open Technology Programme offers funding for excellent research with a view to possible applications of the results. This offers organisations a low-threshold way of linking up with scientific research that must lead to applicable knowledge.




