Future robots that continuously inspect our dykes don’t come across an electrical charging station every few hours. Using a smart gear box for the robot, UT researcher Douwe Dresscher manages to drastically reduce the energy consumption. The energy-autonomous robot comes closer.
Inspecting the condition of dykes and other sea defence structures is typically a task for robots, working in a team and in a highly autonomous way. But if they move around across the dykes, perform tests and communicate the results for six hours a day, they use a lot of energy. Introducing charging stations are not a very realistic scenario. Douwe Dresscher did research on making the robot as autonomous as possible. He does that by charging mechanical energy and by introducing an innovative automatic gear box: it is a modern version of the ‘variomatic’ - Du ‘pientere pookje’ - used in Dutch DAF automobilies. Instead of a belt drive, like in the variomatic, two metal hemispheres are used.
Rolling or walking
The first consideration Dresscher had to take into account was about the best way of moving on the dyke: using wheels, caterpillar tracks or legs. Wheels do quite well and energy efficient on an even surface, but a wet and muddy slope is something quite different. Tracks are more powerful in this case, but they can damage the dyke by the way they turn. And they are quite energy inefficient. Thus, surprisingly, a walking robot performs best, with four to six legs. In a world without friction, supply and demand of energy are in balance in a walking robot. Nevertheless, they still consume a lot of energy. Existing commercial walking robots always wear a big battery pack.

In this video, Douwe Dresscher explains the principles of the new drive train for robots (video by Merijn Reerink)
Mechanical storage
Electromotors are primarily responsible for this high level of energy consumption. They perform best at high revolution speeds and low torques, but in the walking movement, they often work at low revs and high torques in stead. By storing energy not in an electrical but in a mechanical way, the electromotors can do their job in the best operation regimen, and mechanical energy can be reused. This is what Dresscher calls Controlled Passive Actuation.
The system stores mechanical energy in a spring, for example. A cleverly designed gear box takes care of the optimum transmission. Two half turning half hemisphers therefore are constantly in contact. The angle changes when the torque changes – resulting in another relative radius. The difference in effective radiuses determines the transfer ratio and the best mechanical load. The electromotors join in, only to compensate for mechanical losses. By doing so, they can work within the high rev – low torque regime.
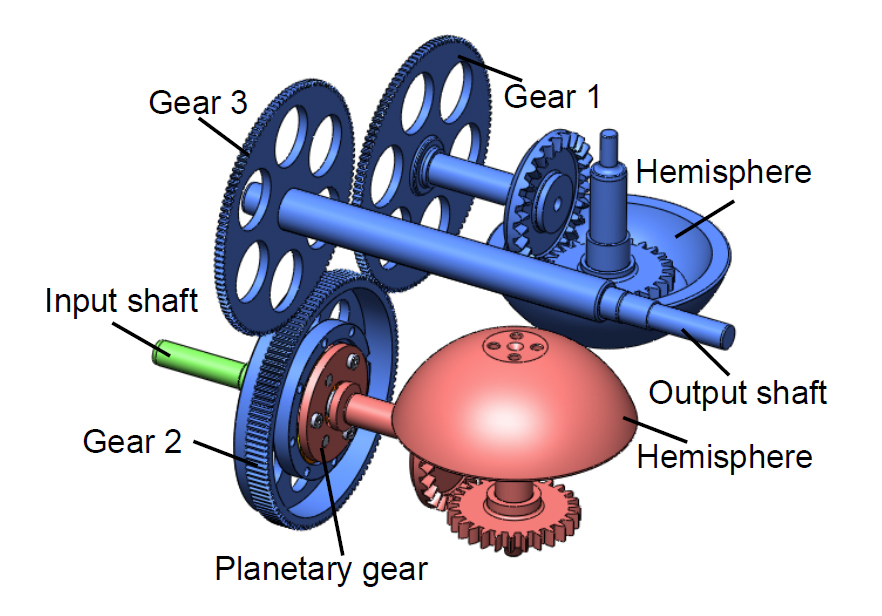
Gearbox with Continuously Variable Transmission using Two Hemispheres
Fully autonomous
To make the dyke robots fully self-supporting – sensing and communication also require energy – they will have to ‘harvest’ energy when moving. Solar and wind energy are options, as well as biomass. Dresscher didn’t look into this in details: his work is fully on the locomotion part of the robot and the powertrain. For actual use in robots, this has to made smaller and mechanical losses can still be reduced.
The new powertrain is specifically designed for future dyke inspection robots, but improving the energy efficiency of existing robots and robot arms is an attractive application as well.
Douwe Dresscher (Smilde, 1987) did his PhD research in the Robotics and Mechatronics (RaM) group of the University of Twente. The group is part of UT’s CTIT Institute for information technology. The research was funded by Dutch Technology Foundation STW. Dresscher’s promotor is Prof Stefano Stramigioli and his thesis is titled ‘‘Controlled passive actuation – concepts for energy efficient actuation using mechanical storage elements and continuously variable transmissons’.




