Effectiveness, efficiency, sustainability, hygiene, and the limited availability of skilled personnel due to unappealing working conditions are the drivers for replacing human labor by technology in agro-food production and processing. Robots have entered this sector but current robotic technology is not able to deal with the large variations in shape, size, and softness of agro-food products nor the variation in environmental conditions and tasks that are typical for the agro-food chain.
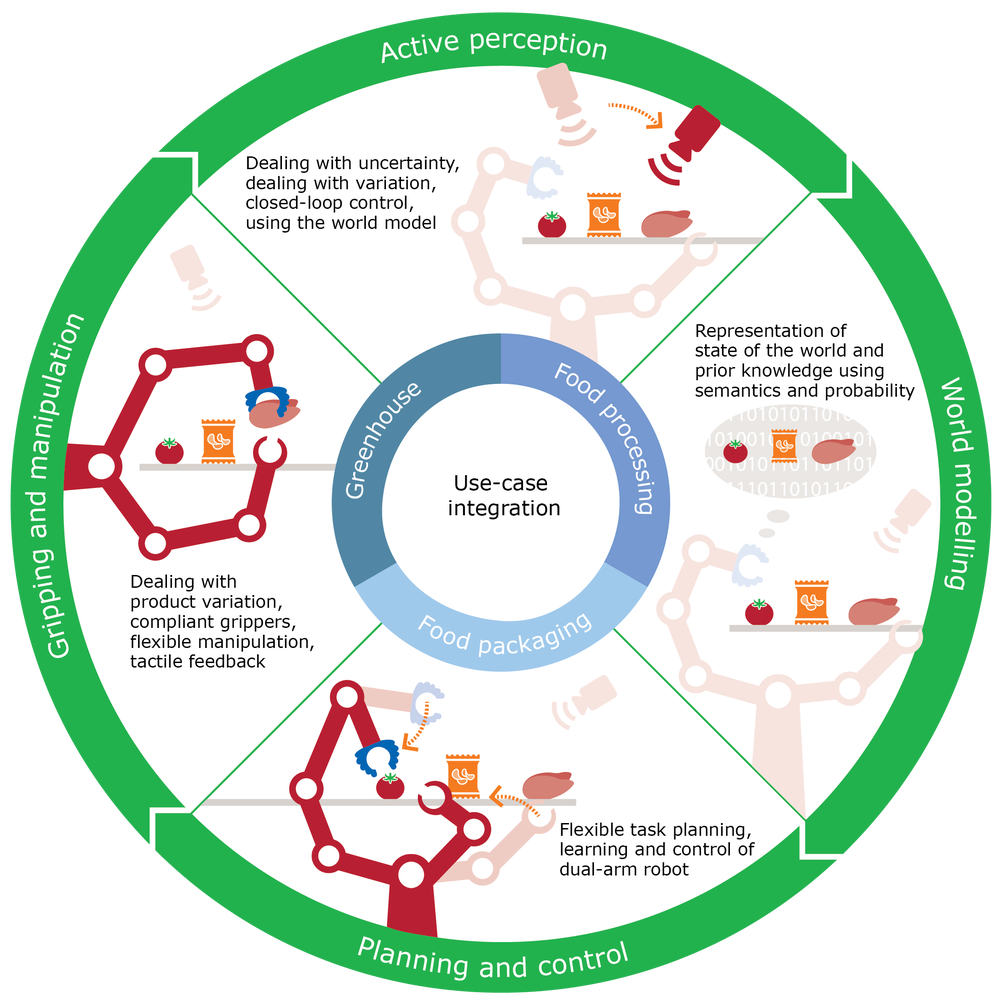
The scientific challenge of the FlexCRAFT project is to equip robot technology with generic capabilities in active perception, world modeling, planning and control, and gripping and manipulation; capabilities needed to deal with the aforementioned conditions in a robust way. These capabilities will be integrated in three use-case projects in greenhouse production, food processing, and food packaging. These use-cases represent the class of challenges encountered in the whole agro-food chain. By integrating all the required disciplines, this program builds on a strong multi-disciplinary consortium of experts in both research and development and a user group with leading industry. This program is a timely response to an urgent request by the Dutch agro-food industry for more advanced robot technology necessary for the continued leadership of Dutch producers in the international market.
FlexCRAFT is a Dutch research program to advance Cognitive Robotics for Flexible Agro-Food Technology. The program is executed by an team of robotic researchers from five universities in collaboration with fourteen companies and supported by NWO/TTW.
More information: https://flexcraftprogram.com/
Research projects and use cases
The program revolves around three agro-food use-cases. The uses-cases give rise to generic robotic challenges in dealing with variation. Demonstrators for each of the use-cases will be developed in the use-case projects P5, P6 and P7.
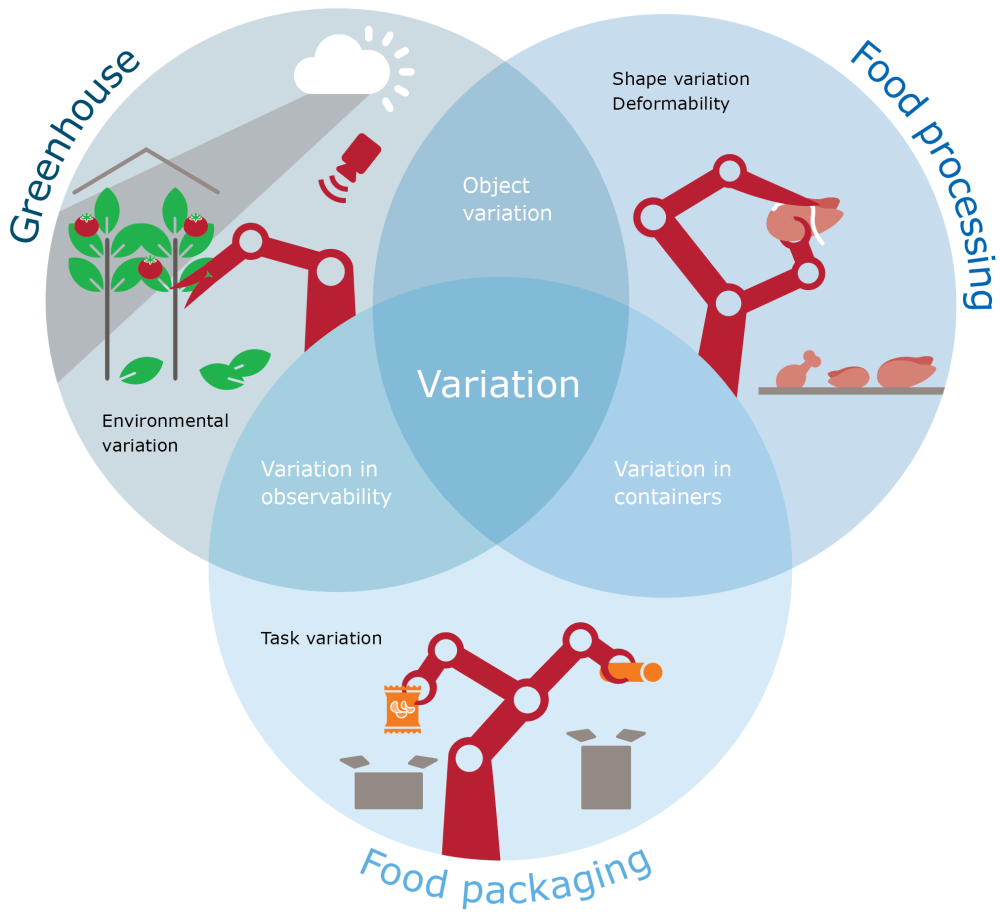
To deal with these challenges, generic robotic methodologies will be developed in the four generic research projects, P1, P2, P3 and P4. These generic methodologies will be integrated, tested and evaluated in the use-case demonstrators. We will focus on P4 Gripping and Manipulation.
Gripping and Manipulation
Current robotic gripping technology is able to handle well-defined, rigid objects. However, grippers for harvesting, food processing, and packaging have to perform their tasks under demanding requirements, such as robustness to variability in product size, shape, and softness, and fast operation to reduce cycle times. State-of-the-art robotic technology does not address these challenges. This large variation demands different grasp types, with different force distributions and different grasp stiffness. We will approach these challenges using compliant mechanism based grippers which on the one hand allow integration of complex functionality such as underactuation, softness adaptability and joint locking, but on the other hand pose challenges such as limited load bearing capacity, off-axis stiffness and compactness due to a limited range of motion.

