PE lab

The research lab “Precision Engineering” (PE) was founded in July 2016. It originates from the Mechanical Automation and Mechatronics lab, and became an independent research lab by the appointment of Prof. Dannis Brouwer.
Precision Engineering considers the development of model-based methods for the design and control of high-precision systems.
The main goal of the design activities is to continue, elaborate and to ‘scientificate’ 'Design Principles for Precision Mechanisms' by using a model-based approach. By developing new and advanced modeling methods like flexible multibody modeling, complex system designs can be thoroughly analyzed, understood, designed and optimized.
The main goal of the control activities is to develop improved motion control using an adaptive model-based approach. Models are available from design or analysis and online updating ensures matching the actual system dynamics. These models then used for improving precision through (disturbance) feedforward control, disturbance rejection control or feedback control optimization.
design principles
Professor W. van der Hoek founded the unique Dutch method (School van der Hoek) for designing precision machinery, at Philips and the Technical University of Eindhoven. Since 1962, he has worked hard to conceive and gather the design principles needed to design mechanisms with predictable dynamic behavior and high positional accuracy. This collection was originally included in a chapter of the lecture notes titled ”Predicting the dynamic behavior and positioning accuracy of constructions and mechanisms”. With the addition of design insights and experiences gained by students and colleagues at the University of Eindhoven, and by design engineers at Philips and other companies, this chapter became a tool for learning how to design, as well as a reference tool for more experienced design engineers. The collection can be regarded as the first version of the design principles book, written in Dutch, and commonly known as ”Des Duivels Prenten boek”. After Professor W. van der Hoeks retirement in 1984, Professor M.P. Koster continued this work at the at the Technical University Eindhoven and Philips. From 1990 onwards Professor M.P. Koster switched to the University of Twente but stayed with Philips. The first official book ”Constructie Principes” in Dutch was born, which contained new examples and insights. When Professor M.P. Koster retired in 2001, Professor H.M.J.R. Soemers took over. He was the first to open the knowledge to the world outside the Netherlands by translating and editing the prior art, and converting it in his book, ”Design principles for precision mechanisms”. Over the entire period several people have made additional important contributions to the collection. To our best knowledge these include: Ing. D.M. van Dijk, Ir. P.C.J. van Rens and Dr.ir. P.C.J.N Rosielle. PE Lab is responsible for the education of Design principles for precision mechanisms, DPPM1 in the Bachelor and DPPM2 in the Master.



From left to right:
W. van der Hoek (Professor 1962-1985), M.P. Koster (Professor 1984-2001), and H.M.J.R. Soemers (Professor 2002-2011).
flexible multibody modelling
Readily available Finite Element Method (FEM) models allow analysis of complex models with a large range of motion combined with high accuracy. However, for large range of motion flexure mechanisms with the inherent non-linear behaviour, combined with the large number of elements for achieving sufficient accuracy, the models become time consuming. A large number of elements is required because of the typical high aspect ratio of flexures. An additional complexity is ‘void crushing’ which is why FEM based optimisation, known as ‘topology optimisation’, has not successfully led to significant results for large range of motion flexure joints.
To strongly reduce computation time of flexure models we build on a beam finite element formulation for large deflection multibody systems developed by Prof. Jonker and Dr. Meijaard. The method combines invariance for rigid body motions with linear beam models at various levels of sophistication ranging from small-deflection beam theory to relatively advanced formulations involving geometric nonlinearities arising from large deflections. The method has been implemented in the program SPACAR. An interface to MATLAB/SIMULINK has been developed by Dr. Aarts.



From left to right:
J.B. Jonker (Professor 1996-2011), J.P. Meijaard (PostDoc in PE Lab), and R.G.K.M. Aarts (in AMDA Lab)
Flexure anaysis and design
This core compentence is based on the unique combination of Design Principes and Flexible Multibody Modelling (SPACAR) enabling fast and efficient analysis required for optimization. Please see the movie below:

Applications
- Semiconductor equipment (ASML)
- Analysis and measurement equipment (Thermo Fischer Scientific, IBS precision Engineering )
- Aerospace (FokkerElmo, NLR, Dutch Space)
- Flow meters (Bronkhorst)
- Consumer Lifestype (Philips)
- High-end technology suppliers (DEMCON, VDL-ETG, IMS)
- Photonic devices (XIO Photonics, TE)
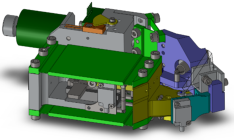
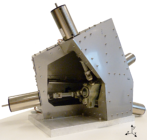
T-Flex: Fully flexure-based hexapod with large range of motion

The T-Flex combines a unique repeatbility of 50nm with 200mm strokes and 5-10g acceleration.
example results



Flexures: Large range of motion flexures for precision applications and for robotic and prosthesis applications (fully flexure-based prosthetic hand).

Mechanisms: Industrial positioning mechanisms.
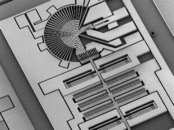


MEMS: micro-positioning stages.



Robotics: parallel kinematic shoulder joints, hopping mechanisms, humanoid heads