For the first time ever, wireless millirobots navigated a narrow blood vessel both along and against arterial flow. Researchers from the University of Twente and Radboudumc inserted the screw-shaped robots in a detached aorta with kidneys where they controlled them using a robotically controlled rotating magnet. Health Holland recently awarded a grant to further develop the technology to be able to remove blood clots.
Each year worldwide, one in four people die from conditions caused by blood clots. A blood clot blocks a blood vessel preventing the blood from delivering oxygen to certain areas of the body. Surgeons can use flexible instruments to remove the blood clot therefore allowing the blood to flow again, but some regions in the body are difficult to reach. Millirobots can overcome these limitations and remove blood clots from difficult-to-reach blood vessels.
Synergistic Triumph
The researchers showed that these millirobots were able to travel through blood vessels. But to do so, the millirobots need power, to travel up- and downstream and to accurately be controlled and localised. Last but not least, they need to be biocompatible and leave no further damage to the inside of blood vessels. At the Technical Medical Centre of the University of Twente, the researchers set up their experiment with a real aorta and kidneys. “This required an interdisciplinary approach and the collaboration of many different departments. The Robotics Lab, Laboratory of biointerface, blood lab, DesignLab, LipoCoat, and MESA+ all helped us achieve this successful outcome”, explains researcher Islam Khalil.
Guided by Precision
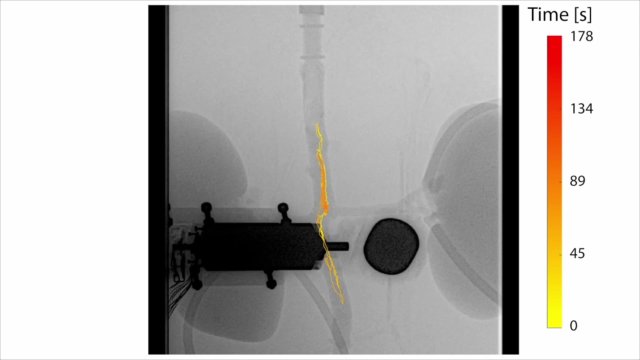
In the experiment, the researchers used a robotically controlled rotating magnetic field to control the millirobots wirelessly. With an X-ray machine, they were able to localise the millirobot while steering through the aorta. The researchers maintained a maximum arterial flow of 120 ml per minute inside the aorta. But with a stronger magnetic field, the millirobots should be able to overcome a greater blood flow. The millirobots performed stable straight runs with and against the flow, and also with multiple robots at the same time.
Miniature Marvels
The robots themselves are 3D-printed, screw-shaped objects with a small permanent magnet inside. “This tiny magnet of just one millimetre long and one millimetre in diameter is placed in such a way that it can rotate the ‘screw’ in both ways. This allows for swimming against the flow and then turning around and swimming back”, explains Khalil. The small size makes it possible to use several robots at the same time. And the screw shape makes it possible to drill through a blood clot.
Unlocking Potential
“These millirobots have huge potential in vascular surgery”, says Michiel Warle, a vascular surgeon at Radboudumc. “Currently, we use blood thinners and flexible tools, but a millirobot can travel to hard-to-reach arteries while they only need minimal incisions to be inserted.” In a new collaboration with Radboudumc and Triticum Medical (Israel), the researchers will further develop the millirobots to enable them to remove blood clots wirelessly. The consortium will look at ways to exploit this technology fostering collaborative growth in medical robotics and technical medicine.
Besides breaking up the blood clots to enable the blood flow of arteries, the technology can potentially be used for other targeted interventions. “The robots can deliver drugs to very specific places in the body where the drug is needed the most. That way we have minimal side effects in the rest of the body”, explains Khalil.
Power in Collaboration
This research is a collaboration between Radboudumc and the University of Twente. It received funding from the TURBO (Twente University RadBoudumc Opportunities) programme. With the TURBO programme, research groups from both institutions can expand an innovative idea into a large research project. The researchers extended their collaboration with Triticum Medical (Israel) to further develop the millirobots. Health Holland recently awarded them a TKI-LSH (Topconsortia for Knowledge & Innovation – Life Science & Health) grant for public-private partnerships from Health Holland
Dr. Islam Khalil is Assistant Professor in the Department of Biomechanical Engineering (BE; Faculty of ET / TechMed Centre). His research interests include the modelling and design of motion control systems for soft microrobots, biologically-inspired microrobots, mechatronic system design, and untethered magnetic micro/nanorobotics with applications to micro/nanomanipulation, micro-assembly, and targeted drug delivery.




