Rain erosion damage assessment using ultrasonics
Yogesh Sharma - UTwente internal assignment (September 2019 – May 2020)
Thesis: https://essay.utwente.nl/81320/
SUMMARY
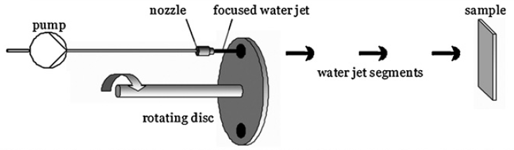
Leading edge erosion is a serious failure mode occurring at the leading edge of rotor blades in a wind turbine. The main cause of erosion is the impact of raindrops hitting the rotating rotor blades at velocities above 100 m/s. Erosion decreases the wind turbine annual energy production by 2 to 3.7 %. Erosion resistant coatings are applied on the blades to lengthen the life of the blade. Coatings should be tested for its erosion resistant properties and for this purpose, an in-house rain erosion test setup is used to produce water drops at high velocities and then they are impacted onto the surface of the ABS specimen to be tested. A typical erosion curve for a coating looks like as shown below.

There are three stages in the erosion curve, and it is important to know when the first stage ends, and the second stage starts as that is when the mass loss starts to happen in the material. During the first stage, only crack and pits are formed but there is no significant mass loss. The use of Ultrasonics is investigated for the erosion damage assessment in Acrylonitrile Butadiene Styrene (ABS) which is a thermoplastic polymer coating. Piezoelectric sensors are attached to ABS specimen to employ two methods of ultrasonics, namely acousto-ultrasonics (active sensing) and acoustic emission (passive sensing). Lamb waves are produced in thin plates when a harmonic force is applied on it. Lamb waves have been widely used in the past for damage assessment in metals, polymers and composites and it is shown that certain Lamb wave modes are sensitive to specific types of damages.
A methodology was followed wherein preliminary tests were performed on the ABS specimen in the lab and the erosion damage was simulated by drilling a minute hole in the middle of the specimen. Active and passive sensing was used to find damage indicators (DIs) and to develop algorithms that were able to detect, to state the severity and to localise the simulated damage. These damage indicators and algorithms were then used in the rain erosion experiments.
KEY RESULTS
- Anti-symmetric Lamb wave mode, A0 was found to be sensitive to erosion damage. Highest sensitivity was found in the range of 150 kHz to 200 kHz.
- The DI based on the correlation coefficient was found to change monotonically with the increasing impacts and the DIs were used in a damage localisation algorithm called Reconstruction algorithm for probabilistic inspection of damage (RAPID). A DI based on the maximum values of RAPID values at 100k impact intervals was found to have a good relationship with the actual damage (volume loss).

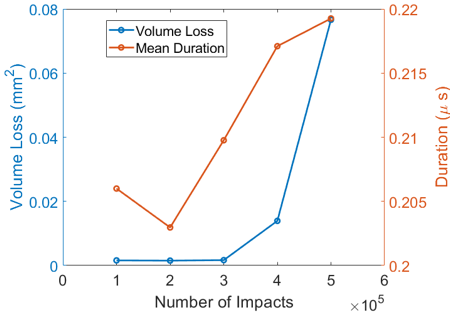
- The features, energy and duration, were also selected from the impact waves measured through passive sensing. The mean of these features at 100k impact intervals showed a similar behaviour (flattening at 500k impacts) as the DI based on RAPID values. The high values at 100k impacts are due to initial plastic deformation and is a typical characteristic seen in the initial stages of any type of loading in passive sensing.

- A minimum four sensors were required to be able to localise the erosion damage through active sensing. Having more sensors can increase the effectiveness of localisation but due to space constraints, this was not possible. The water drop impact was also localised using a triangulation algorithm through passive sensing and it was found that the actual erosion location and the predicted impact location were found to be only 2 mm apart. This indicated that the erosion was occurring at the point of the water drop impact.