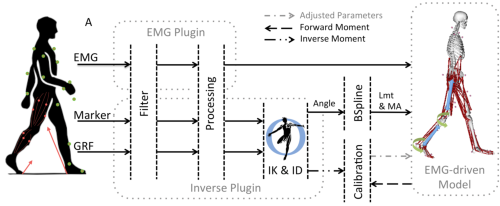
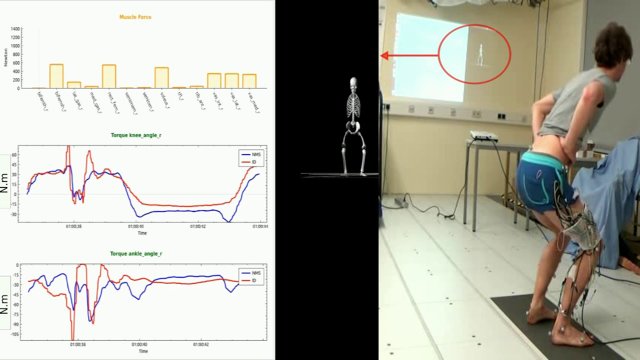
We use electromyography (EMG)-driven musculoskeletal modeling to simulate all transformations from muscle excitation onset (EMGs) to mechanical moment production around multiple lower-limb degrees of freedom (DOFs). We develop calibration algorithms that enable adjusting musculoskeletal model parameters specifically to an individual's anthropometry and force-generating capacity. We incorporate accurate subject-specific models into computationally efficient framework that can be interfaced in real-time with any movement data collection system. Our current result demonstrated the ability of computing forces in 13 lower-limb muscle-tendon units and resulting moments about three joint DOFs simultaneously in real-time. Remarkably, it was capable of extrapolating beyond calibration conditions, i.e. predicting accurate joint moments during six unseen tasks and one unseen DOF.
Our proposed framework can dramatically reduce evaluation latency in current clinical biomechanics and open up new avenues for establishing prompt and personalized treatments, as well as for establishing natural interfaces between patients and rehabilitation systems. The integration of EMG with numerical modeling will enable simulating realistic neuromuscular strategies in conditions including muscular/orthopedic deficit, which could not be robustly simulated via pure modeling formulations. This will enable translation to clinical settings and development of healthcare technologies including real-time bio-feedback of internal mechanical forces and direct patient-machine interfacing.
Selected Publications:
Durandau, G., Farina, D., Sartori, M. Robust Real-Time Musculoskeletal Modeling driven by Electromyograms. IEEE Trans. Biomed. Eng. 1–1 (2017). doi:10.1109/TBME.2017.2704085.