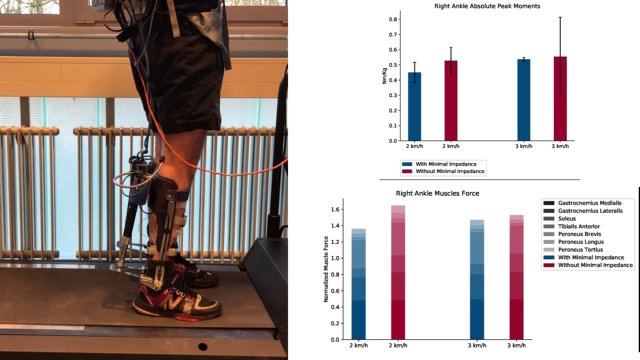
Musculoskeletal modeling formulations driven by electrophysiological recordings can be used to understand the complex dynamics of human-machine interaction in healthy and impaired individuals wearing robotics exoskeletons. We develop advanced online musculoskeletal modeling schemes that predict how an individual’s neuromusculoskeletal system responds to wearable devices connected in parallels to their residual limbs. This information is used in real-time to control wearable robots to restore or enhance human motor capacity.

This approach enables understanding how muscle tissues respond to different exoskeleton operating modes, something central to craft optimally personalized human-machine interfaces
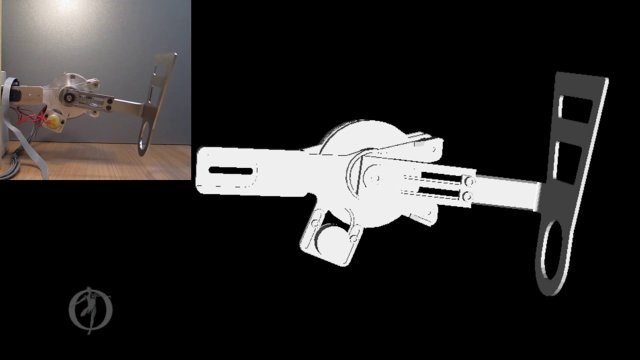
The efforts in robotic devices simulation are constantly increasing in the latest years. A reliable and accurate dynamic simulator could improve the quality of the mechanical and controller design, while reducing the cost of development. We use dynamic modelling and simulation to accurately predict wearable robot function and interaction with biological tissues.
Selected References:
G. Durandau, D. Farina, and M. Sartori, “Robust Real-Time Musculoskeletal Modeling driven by Electromyograms,” IEEE Trans. Biomed. Eng., vol. 65, no. 3, pp. 556–564, May 2018.
G. Durandau, W. Rampeltshammer, H. van der Kooij, M. Sartori. Toward muscle-driven control of wearable robots: A real-time framework for the estimation of neuromuscular states during human-exoskeleton locomotion tasks. IEEE BioRob 2018 (Under Review)
M. Vivian, L. Tagliapietra, M. Sartori, and M. Reggiani, “Dynamic simulation of robotic devices using the biomechanical simulator OpenSim,” in Advances in Intelligent Systems and Computing, 2016, vol. 302, pp. 1639–1651.
M. Vivian, M. Reggiani, J. C. Moreno, J. L. Pons, D. Farina, and M. Sartori, “A dynamically consistent model of a motorized ankle-foot orthosis,” in International IEEE/EMBS Conference on Neural Engineering, NER, 2013, pp. 1558–1561.