INTERACT: Modelling the neuromusculoskeletal system across spatiotemporal scales for a new paradigm of human-machine motor interaction
Neurological injuries such as stroke leave millions of people disabled worldwide every year. For these individuals motor recovery is often suboptimal. The impact of current neurorehabilitation machines is hampered by limited knowledge of their physical interaction with the human. If neuro-modulative and orthotic machines could be controlled to generate optimal stimuli to the neuromuscular system, a new era in neurorehabilitation would begin.
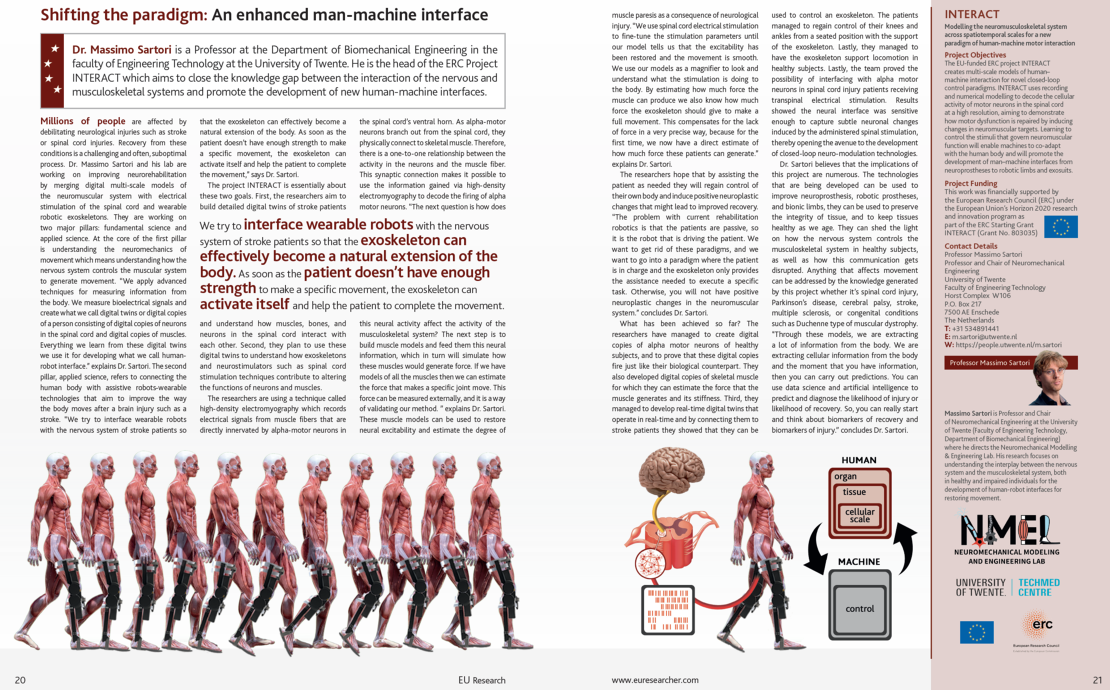
This project creates multi-scale models of human-machine interaction for radically new closed-loop control paradigms. We will combine biosignal recording and numerical modeling to decode the cellular activity of motor neurons in the spinal cord with resulting musculoskeletal forces at a resolution not considered before. We will use these concepts to design new machine control schemes. With a focus on spinal cord electrical stimulation and mechatronic exosuits, we will demonstrate how motor dysfunction is repaired by inducing optimal changes in neuromuscular targets. The innovative aspect is that of gaining control of the stimuli that govern neuromuscular function over time. This will enable machines to co-adapt with the body; an achievement that will disrupt the development of man-machine interfaces from neuroprostheses, to robotic limbs, to exosuits.
INTERACT will answer fundamental questions in movement neuromechanics via novel principles of human-machine interaction, with broad impact on bioengineering and robotics.
For more information, please visit the Project Page on the EU Portal: https://cordis.europa.eu/project/id/803035