Draagbare robots zoals exoskeletten worden vaak gebruikt bij de revalidatie van paretische patiënten (mensen met een gedeeltelijke verlamming, bijvoorbeeld na een beroerte of ruggenmergletsel). Deze exoskeletten werken min of meer zonder diepgaande kennis van het lichaam van de patiënt. Promovendus Guillaume Durandau van de Universiteit Twente voegt controllers toe aan draagbare robots zodat intuïtieve menselijke controle mogelijk is. Met dit onderzoek promoveert hij op vrijdag 6 november.
Guillaume Durandau rust draagbare robots uit met digitale neuromusculoskeletale modelgebaseerde controllers om robuuste en intuïtieve menselijke besturing van draagbare robots mogelijk te maken. Na een letsel dat neuromusculaire laesies veroorzaakt, zoals een beroerte, vindt het grootste deel van het herstel van de motorische capaciteit plaats in de eerste zes maanden na het incident. Na deze periode wordt de patiënt als chronisch beschouwd en is er weinig verdere verbetering te verwachten. Slechts 10% van de beroertepatiënten herstelt volledig, de rest zal met een of andere beperking moeten leven. Een van de belangrijkste aandoeningen is een afname van de mobiliteit als gevolg van spierzwakte of verlies van spiercontrole (30% van de patiënten met een beroerte is niet in staat om zonder hulp te lopen). Om het effect van de beperking te helpen verzachten zijn hulprobots zoals exoskeletten ontwikkeld.
Geen revolutie
"Tot op de dag van vandaag hebben draagbare exoskeletten hun belofte niet waargemaakt. Ze hebben geen revolutie teweeggebracht in het leven van patiënten met neuromusculaire aandoeningen. We hebben nog geen patiënt met een beroerte, geholpen door een exoskelet, vrij op straat zien lopen”, geeft Durandau aan.
Communicatie-interface
Een van de uitdagingen die dit doel in de weg staan is de communicatie-interface tussen de mens en het exoskelet. De huidige aansturing negeert de complexiteit van het menselijk lichaam en gebruikt zeer eenvoudige modellen. De mens wordt aangedreven door de robot, terwijl de mens de robot zou moeten besturen. Dit wordt bereikt met behulp van geavanceerde, maar snelle, neuromusculoskeletale geavanceerde spier-skeletmodellen van het menselijk lichaam.
Verbetering van de kwaliteit van leven
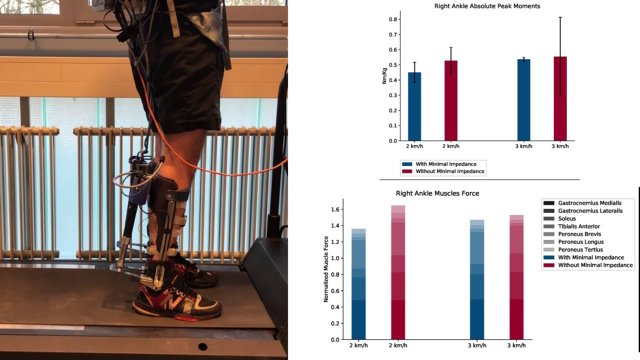
De resultaten van het proefschrift van Guillaume Durandau tonen aan dat de spier-skeletmodellen in real-time kunnen worden geïmplementeerd in kleine draagbare computers. "We tonen aan dat deze spier-skeletmodellen helpen om vrijwillige controle te geven aan paretische patiënten. Zo hebben zij het exoskelet onder controle en tegelijkertijd kost het hen minder spierkracht om te bewegen. De neuromusculoskeletale controller helpt voortdurend bij het minimaliseren van spiervermoeidheid in de meest uiteenlopende loopomstandigheden en bij andere complexe bewegingen die anders moeilijk te assisteren zijn. Dit opent nieuwe mogelijkheden om de mobiliteit van paretische patiënten te vergroten en zo hun levenskwaliteit te verbeteren.”
Meer informatie
Guillaume Durandau is een PhD-student in de onderzoeksgroep Biomechanica (BE). Zijn promotoren zijn prof.dr.ir. H. van der Kooij en Dr. Massimo Sartori van de Faculteit Engineering Technology (ET). De doctoraatsverdediging is live te volgen. Meer informatie over de promotie vind je hier.