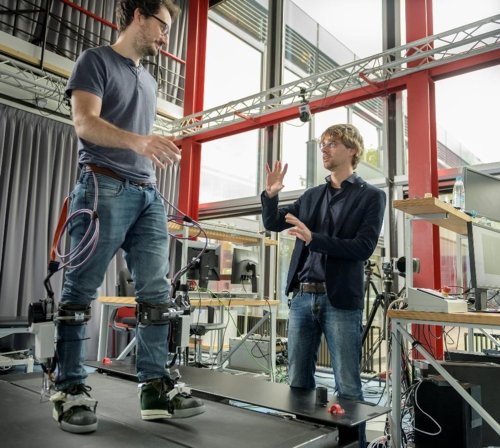
Wearable robots such as exoskeletons are often used in the rehabilitation of paretic patients (people with paralysis, for example after a stroke or spinal cord injury). However, these exoskeletons work more or less without knowledge of the patients’ body internal information. PhD candidate Guillaume Durandau of the University of Twente is adding controllers to wearable robots so that intuitive human control is possible. He will receive his doctorate with this research on 6 November.
Guillaume Durandau, in his research, is equipping wearable robots with digital neuromusculoskeletal model-based controllers to enable robust and intuitive human control of portable robots. After an injury that causes neuromuscular lesions, such as a stroke, most of the motor capacity recovery occurs in the first six months after the incident. After this period, the patient is considered chronic and little further improvement is to be expected. Only 10% of stroke patients fully recover, the rest will have to live with some kind of disability. One of the main affliction is a decrease in mobility due to muscle weakness or loss of muscle control (i.e., 30% of stroke patients are unable to walk without assistance). To help mitigate the effect of the disability the development of assistive robotic devices such as exoskeletons was envisioned.
Not a revolution
“But to this day, portable exoskeletons have failed to deliver on their promise. They have not revolutionized the lives of patients with neuromuscular injuries. We have not yet seen a patient with a stroke, helped by an exoskeleton, walk freely in the streets.”
Communication interface
One of the challenges that stands in the way of this goal is the control and communication interface between the human and the exoskeleton. The current solution ignores the complexity of the human body and uses very simple models to describe it. The human is driven by the robot, while the human should be driving the robot. This is accomplished using advanced, but fast, neuromusculoskeletal models (digital twins) of the human body and how it changes after injury.
Improve quality of life
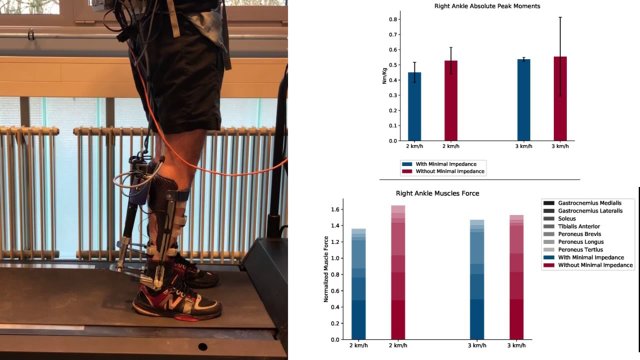
The results of Guillaume Durandau's thesis show that “digital twins” (a digital replica of the patient muscle and skeleton) can be run in real-time on small portable computers. “We show that these digital twins can help to give voluntary control to paretic patients. This way they have the exoskeleton in control and at the same time it costs them less muscle power to move. The neuromusculoskeletal controller continuously helps to minimize muscle fatigue in a wide variety of walking conditions or on a complex movement that is difficult to assist. This opens new possibilities to increase the mobility of paretic patients and thus improve their quality of life.”
More information
Guillaume Durandau is a PhD student in the research group Biomechanical Engineering (BE). His promotor is prof.dr.ir. H. van der Kooij and his supervisor is Dr. Massimo Sartori from the Faculty of Engineering Technology (ET). The PhD defence can be followed on a live stream.More information about the promotion can be found here.