People involved:
Staff members:
- Prof. dr .ir. Herman van der Kooij (coordinator)
- Dr. Edwin van Asseldonk (VirtuRob)
- Dr.ir. Arno Stienen (VirtuRob & MIAS-ATD)
- Dr.ir. Alfred Schouten (MIAS-ATD)
PhD students:
- Ir. Alexander Otten (VirtuRob)
- Ir. Ard Westerveld (MIAS-ATD)
Technical staff:
- Ing. Wouter Abbas (VirtuRob)
- Nikolai Melikian (VirtuRob)
Background
Stroke is the leading cause of disabilities in Western civilizations. The treatment of stroke patients is labor intensive, and strongly dependent on the best-practice opinion of the rehabilitation centre or the individual therapist. Intensive and task-specific treatment of the upper extremity, consisting of active, highly repetitive movements, is regarded one of the most effective approaches in neural rehabilitation for the restoration of arm and hand function. Unfortunately, current standard multi-disciplinary rehabilitation treatment is labor-intensive, requiring one-to-one manual interactions with therapists. Recent technological developments (e.g. robotics, electrical stimulation, videogames) in rehabilitation provide the opportunity to create and implement intensive training in an efficient and safe way, without increasing time spent on supervision by the therapist.
In recent history, several devices based on electrical stimulation of arm and hand muscles have been developed. Although the potential benefit of the technology, very few electrical stimulation devices are used in today’s clinical practice. An important reason for this fact is the cumbersome placement of electrodes for effective stimulation.
The same holds for robotic rehabilitation devices, which have been developed by research groups from around the world. The devices have made the therapy less labor intensive and have provided the therapists and scientific community with more objectively gathered measurements. However, these devices are still struggling to deliver significantly functional improvement over regular therapy for the patients.
Goal
In the VirtuRob project, knowledge of virtual reality and robotics is obtained. This knowledge is used for the realization of a technological system for training of the disturbed arm and hand function of patients with a neurological disease, such as stroke. This technological knowledge makes use of the state of the art insights on motor control, motor (re-)learning and neurological recovery.
In the MIAS-ATD project, knowledge of robotics and electrical stimulation is combined for the realization of a therapeutic device for functional arm/hand training for stroke patients. The aim is to develop a simple system for home use, without the need for a therapist. Using this approach, therapy can be intensified, which might enhance patient recovery.
Experiments & Devices
The Freebal is the first experimental device of the Active Rehabilitation Project (project prior to VirtuRob). The device compensates for the gravitational pull on the human arm, reducing the required muscle forces. The amount of compensation can be adjusted freely. The Freebal is used both to investigate the advantages of using gravity compensation in stroke rehabilitation as the effects of stroke synergies on arm movements.
The Dampace is an energy-dispersing exoskeleton for rehabilitation research, assessment and training. It offers controlled braking on each of the four axes of the shoulder and elbow. A technical novelty is that no manual alignment of the human joint axes with the axes of the exoskeleton is needed. The Dampace is designed to be used for assisting in identifying the causes behind the movement disorders of stroke patients.
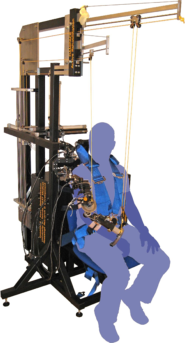
The Limpact is an actively controlled exoskeleton using hydraulic series elastic actuators. By actively controlling the joint axes of the shoulder and the elbow, the identification and training possibilities for persons with neurological disorders will increase as opposed to passive control. The Limpact is still under construction.

The Freebal with passive weight support
The Dampace with passive weight support and passive actuation

The Limpact with passive weight support and actively controlled actuation

Impression of a training session with the Freebal using the weight-support system for a pick and place task

Impression of a training session with the Dampace using virtual reality racing game
The devices developed until now are all aiming at the training of the arm coordination. Within the MIAS-ATD project, training of the arm coordination is extended with training of the grasping function by electrical stimulation. Using this approach, patients can train functional meaningful activities. In addition, patient motivation is expected to be higher, because they can functionally use their arm.
In the near future a new therapeutic device will be developed, based on the integration of robotics and electrical stimulation, aimed at training of functional movements in the patient’s home situation.


Electrical stimulation used for grasping (opening the hand)
Media & Publications
- Freebal & Dampace in Medicalfacts (25-02-2009)
- Dampace in UT news (2009)
- Dampace in UT news (27-11-2008)
International publications
Prange G.B., Jannink M.J.A., Stienen A.H.A., van der Kooij H., IJzerman M.J. and Hermens H.J., An explorative, cross-sectional study into abnormal muscle synergies during functional reach in chronic stroke patients., Journal of Neuroengineering and Rehabilitation 7:14, 2010.
Stienen A.H.A., Hekman E.E.G., Prange G.B., Jannink M.J.A., van der Helm F.C.T. and van der Kooij H., Freebal: design of a minimal weight-support system for upper-extremity rehabilitation., , Journal of Medical Devices 3(4): 1-9, 2009.
Stienen A.H.A., Hekman E.E.G., Prange G.B., Jannink M.J.A., Aalsma A.M.M., van der Helm F.C.T. and van der Kooij H., Dampace: Design of an Exoskeleton for Force-Coordination Training in Upper-Extremity Rehabilitation, Journal of Medical Devices 3(3): 1-10, 2009.
Asseldonk E.H.F., Wessels M., Stienen A.H.A., van der Helm F.C.T., and van der Kooij H., Influence of haptic guidance in learning a novel visuomotor task., Journal of Physiology-Paris 103: 276-285, 2009.
Stienen A.H.A., Hekman E.E.G., Schouten A.C., van der Helm F.C.T. and van der Kooij H., Suitability of hydraulic disk brakes for passive actuation of upper-extremity rehabilitation exoskeletons., Applied Bionics and Biomechanics 6: 103-114, 2009.
Stienen A.H.A., Hekman E.E.G., van der Helm F.C.T. and van der Kooij H., Self-Aligning Exoskeleton Axes Through Decoupling of Joint Rotations and Translations, IEEE Transactions on Robotics 25: 628-633, 2009
Prange G.B., Jannink M.J.A., Stienen A.H.A., van der Kooij H., IJzerman M.J. and Hermens H.J., Influence of Gravity Compensation on Muscle Activation Patterns During Different Temporal Phases of Arm Movements of Stroke Patients., Neurorehabilitation and Neural Repair 23: 478-85, 2009.
Prange G.B., Kallenberg L., Jannink M.J.A., Stienen A.H.A., van der Kooij H., IJzerman M.J. and Hermens H.J., Influence of Gravity Compensation on Muscle Activation Patterns During Different Temporal Phases of Arm Movements of Stroke Patients., Journal of Electromyography and Kinesiology 19: e40-e49, 2009.
Jannink M.J.A., Prange G.B., Buurke J.H., Stienen A.H.A., van Asseldonk E.H.F. and van der Kooij H., State of the art. CVA-revalidatie van beperkte arm- en handfunctie: Virtual Reality en Robotica?, Nederlands Tijdschrift Fysiotherapie 118: 86-94, 2008.
Stienen A.H.A., Schouten A.C., Schuurmans J. and van der Helm F.C.T., Analysis of reflex modulation with a biologically realistic neural network., Journal of Computational Neuroscience 23: 333-48, 2007.
Conference publications
Stienen A.H.A., Hekman E.E.G., Ter Braak H., Aalsma A.M.M., van der Helm F.C.T. and van der Kooij H., Design of a Rotational Hydro-Elastic Actuator for an Active Upper-Extremity Rehabilitation Exoskeleton., BioRob 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, Arizona, USA: 2009, p. 881-888.
Stienen A.H.A., Hekman E.E.G., van der Kooij H., Ellis M.D. and Dewald J.P.A., Aspects of Weight-Support Mechanisms in Rehabilitation Robotics, World Congress on Medical Physics and Biomedical Engineering, Munich, Germany: 2009, p. 392-394.
Stienen A.H.A., Hekman E.E.G., van der Helm F.C.T., Prange G.B., Jannink M.J.A., Aalsma A.M.M. and van der Kooij H., Dampace: dynamic force-coordination trainer for the upper extremities, ICORR 2007 – IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, the Netherlands: 2007, p. 820-826.
Jannink M.J.A., Prange G.B., Stienen A.H.A., van der Kooij H., Kruitbosch J.M., IJzerman M.J. and Hermens H.J., Reduction of muscle activity during repeated reach and retrieval with gravity compensation in stroke patients, ICORR 2007 – IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, the Netherlands: 2007, p. 472-476.
Prange G.B., Stienen A.H.A., Jannink M.J., van der Kooij H., IJzerman M.J. and Hermens H.J., Increased range of motion and decreased muscle activity during maximal reach with gravity compensation in stroke patients, ICORR 2007 – IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, the Netherlands: 2007, p. 467-471.
Multimedia
Testing the range of motion of the Dampace
Congress posters
Congress posters
Collaboration
BAAT Medical (VirtuRob)
BAAT medical is located in Hengelo and creates innovative products for the medical marketplace. Currently they focus on four fields; surgical procedures and implants, spine, orthosis and prosthesis and rehabilitation devices.
Demcon Advanced Mechatronics (MIAS-ATD)
DEMCON realizes high-tech mechatronic systems and products through research, development and production. With its mechatronic approach to design, DEMCON generates high-end solutions for complex issues in various markets, ranging from semicon and defense to medical and life sciences. DEMCON supplies advanced systems to leading OEMs and is an excellent partner for small and medium-sized enterprises in the introduction of their innovative products to existing and new markets.
Within the MIAS-ATD project, DEMCON has the role to translate the different user needs into a comprehensive set of functional and technical requirements. These requirements will then be used by the project partners to develop the different sub-modules, like a robotic system, an electro-stimulator and a gaming interface. In the system integration phase, DEMCON will assemble these modules, build a functional prototype of the ATD and will perform the technical tests to ensure the specifications are met.
RE-lion (VirtuRob)
Re-lion BV is located in Enschede and focuses on the development, maintenance and support of training systems for the Defense and Healthcare industries. Their roots can be found at the University of Twente, department of Human-Machine interaction.
Roessingh Research and Development (MIAS-ATD & VirtuRob)
Roessingh Research and Development (RRD), the largest Dutch scientific research center in rehabilitation technology, is an independent R&D organization linked to The Roessingh rehabilitation centre in Enschede. Its mission is to generate innovations in rehabilitation care through top class academic research. RRD is internationally recognized as a centre of excellence in the fields of restoration of human function, non-invasive neuromuscular assessment and pain rehabilitation. Since 2004, RRD and care experts from The Roessingh have headed the National Innovation Centre for Pain Rehabilitation and Rehabilitation Technology, which is certified by the Dutch Ministry of Health, Welfare and Sport. RRD has a strong cooperation with the Twente University where 2 scientific chairs are filled in by RRD/Roessingh researchers: Neuromuscular Control and Rehabilitation Medicine and Technology.
Research within RRD is organized in 3 different Research clusters: Restoration of Human Function, Non-Invasive Neuromuscular Assessment and Technology-Assisted Pain Rehabilitation. RRD projects are financed through the subsidy network for care-related research, both at national and European level. Research projects are not only confined to research. At RRD knowledge generated by academic research is put into practice. More than sixty employees, including two professors, are striving to realize RRD's ambition of becoming one of the world's leading academic centres of excellence in the field.
tic Medizintechnik (MIAS-ATD)
Since establishment in 1999 tic Medizintechnik has grown from a German start-up-company to a global player in the development of medical diagnostic systems for urodynamics and devices for neurological rehabilitation. Today tic Medizintechnik is well known as a manufacturer and distributor of urological/gynaecological functional diagnostics and electrotherapeutical products. A worldwide network of distributors and branch offices in Austria and Germany promote, sell and distribute tic-products to universities, public and private hospitals and physicians.
tic Medizintechnik has long-time experiences in national and international funded projects focusing on the development of new sophisticated medical products. Due to it's expertise in electro stimulation and biofeedback, tic Medizintechnik joined the MIAS-ATD project and was asked to develop the hard- and software supporting the robotic based therapy system.
UMC St Radboud (VirtuRob)
Rehabilitation research at the UMC St Radboud focuses mainly on movement disorders as a consequence of neuromuscular and neurodegenerative diseases (for instance Parkinson’s disease), disorders of the central nervous system (for instance stroke) and severe traumata (for instance amputations). Furthermore, there is a good collaboration with the department of RD&E at the St Maartenskliniek in Nijmegen, where research on motor rehabilitation is performed.
Within the Virturob, Radboud University Nijmegen Medical Centre focuses on the cognitive aspects of the use of robotics and virtual reality in stroke rehabilitation. Theories of motor learning and motor control will be implemented in the development of a training study for the upper extremity after stroke. In this study, it is hypothesized that functional recovery of stroke patients is dependent on the reduction of cognitive involvement during motor tasks. When the cognitive load during an arm task is too high, it is unlikely that a stroke patient will implement this task into his or her activities of daily living (ADL).
Use-Lab (MIAS-ATD)
The Use-Lab GmbH is an international, independent and objective co-developer and consultant for medical device manufacturers. Our specialists in human factors help them fit their products to the physical and cognitive characteristics of the product users by improving usability for safe and intuitive operation. The Use-Lab interdisciplinary team of engineers, human factor specialists, designers, physicians and OR/ICU nurses has extensive experience in usability engineering, with firm knowledge of the different processes in the health care market. Wide experience in analyzing and optimizing OR, ICU, laboratory, home care, lay care, dialysis and dental care, ophthalmologic and radiological devices is available. Use-Lab integrates typical user groups into the development cycle in order to consider their requirements early in the development process. User needs are identified and can be translated into user-centered products.
Within the MIAS-ATD project Use-Lab is accompanying the development process by tailoring the products to the needs of the different user groups and users. Therefore Use-Lab is analysing the market to specify the requirements and furthermore to verify and to validate the specifications performing focus groups and usability tests with the potential users. Finally Use-Lab is preparing the documentation, necessary for the certification of the final products.
Other faculties at the University of Twente
Prof.dr.ir. Peter Veltink (Biomedical signals and systems, EWI)
Acknowledgements
Current funding
- INTERREG IV A (MIAS-ATD)
- Pieken In de Delta – Oost-Nedeland (VirtuRob)
Past funding
- SenterNovem (Active Rehabilitation)