PROJECT SUMMARY
Smart dust sensor networks are envisioned as a collection of very tiny and cheap, low-complexity, ultra-low-power sensor nodes, capable of sensing and communicating within a few tens of meters to fulfill complex, large-scale monitoring tasks in a wide variety of applications. Large-scale deployment of these nodes in dynamic environments and limitations in battery life impose very harsh requirements regarding robustness and energy efficiency. For instance, due to their very tiny size, smart dust sensor nodes are more vulnerable to environmental effects (such as wind) compared to the conventional wireless sensor nodes. Examples of application areas are target detection, logistics, security tracking, asset management, search and rescue operations, animal habitat and water quality monitoring, patient monitoring, and precision agriculture. In most of these applications, location-awareness is an essential feature, because the collected information is often meaningless without location knowledge.
Example of a Wireless Sensor Network for firedetection.
Recently, ultra-wideband (UWB) communication has been specified in the IEEE 802.15.4a standard, and has proven to be a promising technology for localization systems because of its fine ranging resolution and through-wall penetration capabilities. UWB theoretically offers a ranging accuracy of a few centimeters when combined with time-based ranging methods (such as time of arrival, time difference of arrival, or two-way time of arrival). Furthermore, low-cost, low-complexity and low-power design features make UWB radios quite attractive for implementation in smart dust sensor nodes. Although time-based UWB localization systems theoretically offer centimeter-level accuracy, there are still some open issues, such as non-line-of-sight (NLOS) or multipath propagation, which decrease the accuracy in practical implementations. In line-of-sight (LOS) conditions (see Tx-Rx1 in the figure), a dominant direct-path signal is followed by weak multipath components which are present because of the reflections through the walls, floors or other objects in the environment. If the direct-path is obstructed with an obstacle (such as in Tx-Rx2), the direct-path will generally be no longer dominant due to the attenuation but still detectable. However, if the direct-path is totally blocked (such as in Tx-Rx3), then the direct path will be below the detection threshold and the first multipath component will be detected as the direct path resulting in significant ranging errors. Considering random deployment of these sensor nodes in harsh outdoor and indoor environments, the occurrence of NLOS propagation is very likely. Therefore, robust techniques have to be investigated before the large-scale deployment of sensor nodes using UWB radios.
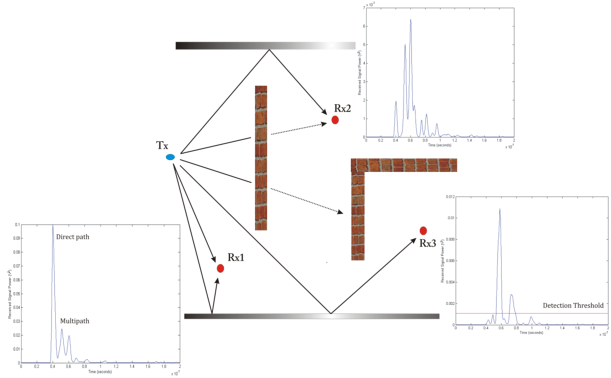
Received impuls responses of various paths in a practical Wireless Sensor System.
In this project, we examine small-scale scenarios and investigate the methods to handle NLOS-related ranging errors, taking into account the design considerations mentioned above. Our approach is to gather statistics about the ranging error exploiting certain UWB signal features. These statistics are used to predict the ranging error or identify the NLOS nodes in order to mitigate the ranging error related to NLOS propagation. One should also consider the mobility of the nodes while deriving the statistics. Then, the focus will be on the large-scale deployment and we will investigate cooperative localization schemes that are also robust to NLOS conditions.