Goal
A lack of mobility often leads to limited participation in social life. The purpose of this STREP is to conceive a system empowering lower limbs disabled people with walking abilities that let them perform their usual daily activities in the most autonomous and natural manner.
The project addresses 3 main different fields of expertise:
- BCI technologies
- Virtual Reality
- Exoskeleton Mechatronics and Control
The project top level objective is to combine these expertises to develop an integrated MINDWALKER system. In addition the system shall undergo a clinical evaluation process.
UT’s role is to develop control algorithms for handling the orthosis and actuation and to support to mechatronics design by TU Delft.
Overview of the prototype of MINDWALKER
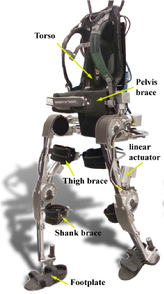
MINDWALKER exoskeleton

A SCI patient wearing the MINDWALKER. Assisted by the MINDWLKER, the patient is able to stand and walk step by step with hand grabbing the bars.

EEG (SSVEP) controlled MINDWALKER. The subject triggers each step by looking at left/right LEDs mounted on the glasses.
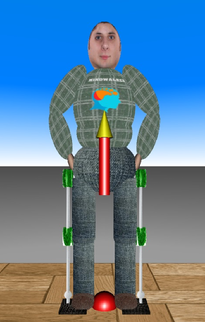
Modelling and virtual simulation. A training platform for MINDWALKER users. A testing and debug environment for MINDWALKER developers.
Project Partners
This European FP7 project involves partners from Iceland, the Netherlands, Germany, Belgium, and Italy.

Media & publications
- Euronews: Exoskeletons on the march

- De Ingenieur: Exoskelet Laat Verlamde Lopen
- NewScientist: Exoskelet laat verlamde mensen lopen
- EU Research & Innovation Magazine: Walking again with an exoskeleton
Conference Proceedings
- L. Wang, E. van Asseldonk, H. van der Kooij, Model Predictive Control-based Gait Pattern Generation for Wearable Exoskeletons. 2011 IEEE International Conference on Rehabilitation Robotics (ICORR)
- (Accepted) L. Wang, E. van Asseldonk, H. van der Kooij, Actively Controlled Lateral Gait Assistance in a Lower Limb Exoskeleton. 2013 IEEE International Conference on Intelligent Robots and Systems (IROS)