
Funding: | FES |
Project: | HTAS – Connected Cruise Control |
Duration: | 2010-2014 |
Supervisor: | Dr. Marieke Martens (AIDA) |
Daily supervisor: | Prof. Dr. Ir. E.C. (Eric) van Berkum |
PhD student: | Msc. Malte Risto |
Website: | Site Malte Risto |
Abstract
Humans are limited in their ability to anticipate and correctly respond to fluctuating traffic flow conditions. Sudden braking manoeuvres in response to external events can lead to shock waves and traffic flow breakdown. The introduction of cooperative systems (e.g. Cooperative Adaptive Cruise Control) will lead to an automation of the driving task and will bypass human limitations while enhancing traffic flow efficiency. On the other hand research has shown that excessive reliance on automation can lead to alienation with the driving task which makes it difficult for the driver to regain control in the case of a system failure.
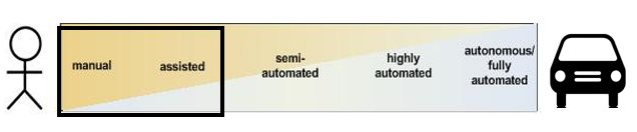
A possible solution is a cooperative system that keeps the driver in the control loop and supports his development of situation awareness and the process of decision making instead of taking over vehicle control. The Connected Cruise Control (CCC) is intended to fill this position by providing an advice to the driver regarding speed, headway and lane in order to support his anticipation of critical events and eventually prevent shock waves that lead to congestion. Like automated systems it is based on the integration of in-vehicle systems and roadside algorithms for traffic flow improvement.
The advice provided can be to maintain a certain speed, to accelerate or decelerate according to a specific speed profile, to use a specific driving lane, to keep a certain following distance or a combination of these. The system will not intervene with the driving task, but provide information to the driver and advise him to show a specific behaviour. If a driver were not to respond to the CCC advice, the system will not have any beneficial effects.
This raises the question how the information needs to be conveyed so that the driver will be able and willing to exhibit the desired behaviour. This question will be addressed from a cognitive psychological perspective using a driving simulator to study the driver workload and acceptance of the CCC for different human-machine interface (HMI) designs.
The project started in the beginning of 2010. At this point an overview of the state of the art of driver behaviour in near-congested traffic as well as HMI and Human Factors (HF) guidelines is being prepared. In an iterative process starting in May, a preliminary design of the CCC-HMI will be developed to assess its impact on driver behaviour and acceptance.
Publications