Onderzoekers van de UT onder leiding van prof. Massimo Sartori, in samenwerking met de wereldwijde academische instellingen McGill University (Canada) en Griffith University (Australië) kondigden CEINMS-RT aan. Een baanbrekend open-source platform ontworpen om het gebied van draagbare robotica te transformeren.
Dit innovatieve raamwerk maakt realtime, neuromechanische, model gebaseerde besturing mogelijk voor bewegingsondersteunende robots zoals exoskeletten, exosuits en bionische ledematen, wat ongekende mogelijheden biedt voor de ontwikkeling van revalidatie en menselijke bewegingsondersteuning.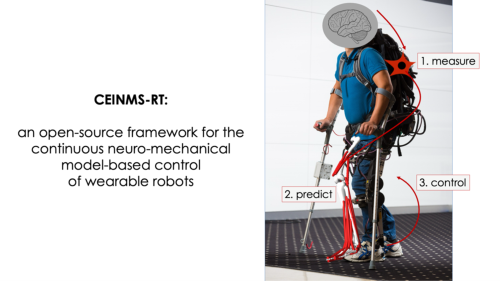
CEINMS-RT (Calibrated EMG-informed Neuromusculoskeletal Modeling Software - Real-Time) is klaar om de aanzienlijke uitdagingen op het gebied van draagbare robotica aan te pakken door de kloof tussen menselijke intenties en robotacties te overbruggen. Traditionele benaderingen zijn vaak gebaseerd op gepatendeerde systemen of niet flexibele, vooraf gedefinieerde besturingsschema's, waardoor het aanpassingsvermogen en de toegankelijkheid worden beperkt. CEINMS-RT biedt een vrij beschikbaar, open-source alternatief dat onderzoekers en ontwikkelaars over de hele wereld in staat stelt om de kracht van gepersonaliseerde, bewegings onspecifieke controlestrategieën te benutten.
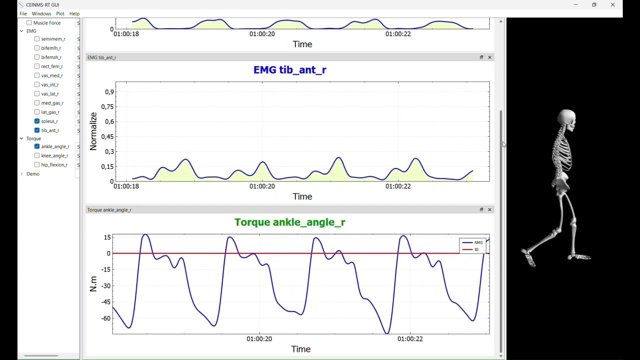
CEINMS-RT grafische gebruikersinterface: De figuren tonen EMG-signalen van de tibialis anterior spieren (tib_ant_r) die worden gebruikt om een spier-skelet model aan te sturen (d.w.z. de skelet avatar op het rechtervenster), waarmee vervolgens biologische enkelmomenten (onderste grafiek) in realtime geschat worden. Geschatte biologische momenten worden gebruikt om bionische ledematen en exoskeletten te besturen.

Bevordering van gepersonaliseerde en adaptieve robotica
Door gebruik te maken van realtime elektromyografische (EMG) gegevens en biomechanische modellen, levert CEINMS-RT nauwkeurige schattingen van spieractivering, spier-peeskracht en gewrichtsdynamiek. Dit detailniveau vergemakkelijkt de ontwikkeling van draagbare robots die opereren als natuurlijke verlengstukken van het menselijk lichaam en zich naadloos aanpassen aan diverse taken en bewegingen.

Neurale besturing van bionische armen. CEINMS-RT wordt gebruikt om elektrische signalen van de spieren om te zetten in handbedieningscommando's voor prothesen. De video toont een transradiaal geamputeerde die een bionische arm bestuurt.

Neurale controle van bionische benen bij een transtibiale geamputeerde.
De unieke mogelijkheden van het platform zijn onder meer:
Realtime neuromechanische modellering: Het continue leveren van, gepersonaliseerde gegevens voor robotbesturing in dynamische omgevingen.
Open-source toegankelijkheid: Bevordering van wereldwijde samenwerking en standaardisering in neuromusculaire modellering.
Bewegings onspecifieke besturing: Ondersteuning van verschillende toepassingen, van het helpen van personen met beperkte mobiliteit tot het verbeteren van atletische prestaties.
Toepassingen in verschillende domeinen
CEINMS-RT heeft zijn transformatieve potentieel al in verschillende scenario's bewezen. In klinische onderzoeken hebben patiënten met neurologische stoornissen met succes de vrijwillige controle over hun ledematen herwonnen met behulp van robotachtige exoskeletten die door het platform worden aangedreven. In een ander geval maakte CEINMS-RT realtime biologische terugkoppeling mogelijk voor gepersonaliseerde revalidatie, waarbij de spier- en gewrichtsbelasting werd geoptimaliseerd om blessures te voorkomen en de herstelresultaten te verbeteren. Bovendien is het platform gebruikt om adaptieve besturingssystemen te creëren voor exosuits met rugsteun, waardoor de belasting van de lumbale wervelkolom tijdens zware tiltaken wordt verminderd, en bionische ledematen, waardoor gebruikers natuurlijke en intuïtieve bewegingen kunnen bereiken.
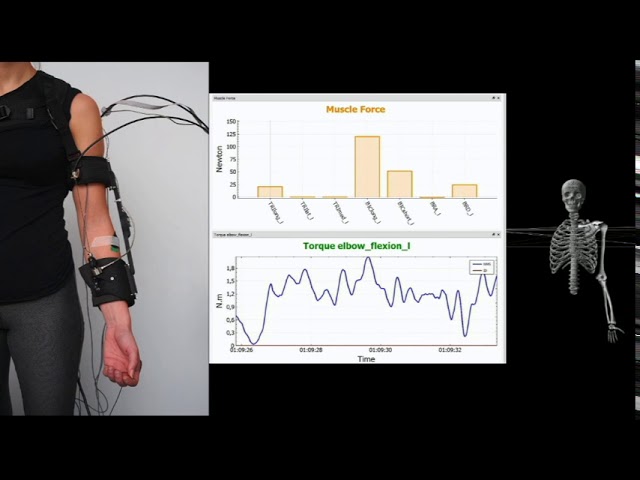
CEINMS-RT wordt gebruikt om elektrische signalen van de elleboogspier om te zetten in besturingscommando's voor een elleboog-exosuit.
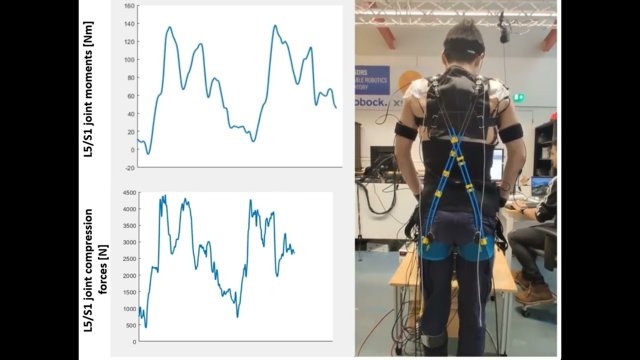
CEINMS-RT wordt gebruikt om elektrische signalen van de rugspier om te zetten in besturingscommando's voor een exosuit voor rugsteun.
Een visie voor de toekomst
De ontwikkeling van CEINMS-RT markeert een belangrijke mijlpaal in de evolutie van draagbare robotica. Als open-source-initiatief nodigt het onderzoekers, ingenieurs en clinici uit om zich aan te sluiten bij een groeiende gemeenschap die zich inzet voor het bevorderen van mens-machine-interfaces. Toekomstige iteraties zijn gericht op het integreren van verbeterde mogelijkheden, zoals modellering van spiervermoeidheid en inschatting van gewrichtsstijfheid, waardoor de impact ervan verder wordt vergroot.
Meer informatie
Ga voor meer informatie over CEINMS-RT en om toegang te krijgen tot het platform naar de GitHub-repository van het project.
Wetenschappelijk artikel: Massimo Sartori, Mohamed I Refai, Lucas Avanci Gaudio, et al. CEINMS-RT: een open-source raamwerk voor de continue neuromechanische modelgebaseerde besturing van draagbare robots. TechRxiv. dinsdag 12 december 2024. DOI: 10.36227/techrxiv.173397962.28177284/v1





