Staff members involved in LOPES:
PhD students
Current
- Ir. Bram Koopman
- Ir. L. Wang
- Ir. Jos Meuleman
Former
- Dr. ir. Jan Veneman
- Ir. Ralf Ekkelenkamp
- Dr. Ir. Heike Vallery
Goal
The goal of the LOPES project (LOwer-extremity Powered ExoSkeleton) is to develop a robotic device (LOPES) for gait training and assessment of motor function in stroke survivors. This involves designing the mechanical setup of the exoskeleton as well as its control structure. LOPES will be used to optimize the functional outcome of (robot-aided) gait training in chronic stroke survivor
Background
Regaining walking ability is one of the major goals during rehabilitation after stroke, as this ability greatly determines the level of socio/economic participation and the overall physical health of patients. There is growing scientific evidence that task specific and intensive training of actively performed movements results in the largest functional improvement. Yet, routine application of such training faces some serious problems. Providing intensive task-specific training is very labor-intensive and puts therapists at risk of injury. The aging of the population will aggravate this situation, as it results in an increase in the number of patients. At the same time a decrease in the number of available therapists is expected. By using robotic devices to provide the patient with the required support, these problems can be circumvented.
Progress and milestones
2001 | Start of project | |
2001-2005 | Testing of different actuation principles: pneumatic (muscles), series elastic actuation | |
2005 | Choice of series elastic and bowden-cable-based actuators for compliant actuation of LOPES | |
Assess importance of pelvic movements in design of robotic gait trainer | ||
2006 | Development of first prototype of LOPES, a lightweight exoskeleton with 8 actuated Degrees of Freedom: Sideways and back and forth movement of the pelvis and hip flexion/extension hip abduction/adduction and knee flexion/extension of both legs. | |
Walking with LOPES in zero impedance mode resembles normal walking | ||
2007 | By using Virtual Model Control the step length and step height of subjects walking with LOPES can be selectively supported | |
Implementation of Complementary Limb Motion Estimation (CLME) to use physiological inter joint couplings to control movement of one leg with the real time motion of the other leg. | ||
PhD defense of Jan Veneman | ||
2008 | Implementation of an innovative way to provide body weight support on a joint level | |
PhD defense of Edwin van Asseldonk | ||
Approval of the Medical Ethical Committee to use LOPES in training stroke survivors | ||
Start of the first clinical trial to test the efficacy of LOPES in improving the walking ability and quality of chronic stroke survivors | ||
2009 | Start of EU project Everyon. In this project we will use LOPES to determine joint impedances of the knee and hip joint and assess to which degree they can be modulated | |
PhD defense of Heike Vallery, who performed several projects with LOPES | ||
Completion of fist clinical trial | ||
Incorporation of an error based learning law in our Virtual Model Approach so the amount of support is automatically adapted to the patient | ||
Grant from Dutch Ministry of Economic affairs and Province of Overijssel to redesign LOPES and make it suitable for use in clinics with acute patients: The PIDON Lopes project | ||
Personal grant for Edwin van Asseldonk (VENI-ZonMW), to investigate the effect of robot aided gait training with non invasive brain stimulation. | ||
2010 | Start of EU project Mindwalker. In this project LOPES will be used to test advanced control algorithm that eventually are going to be used in autonomous exoskeletons. Check the project homepage for updates on this project. | |
2012 | Totally redesigned LOPES is being manufactured and assembled. |
Overview of the first prototype of LOPES with 8 actuated Degrees of Freedom by means of series elastic actuation.
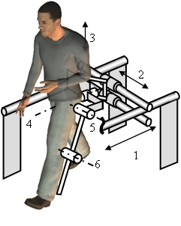
Schematic overview of degrees of freedom

Schematic overview of bowden cable driven series elastic actuator

View from above, showing the actuated pelvic Degrees of Freedom
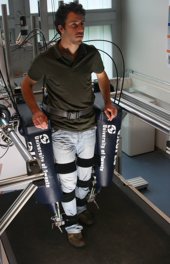
Subject’s leg strapped to LOPES exoskeleton

Realisation of Series elastic actuator at the knee

LOPES undressed
Future plans
Within the currently running project (PIDON LOPES) we are further developing and testing the efficacy of the different assist modes in neurological patients like stroke survivors and spinal cord injury subjects. The large number of actuated degrees of freedom in combination with the chosen control structure provides a large range of possibilities to assist stroke survivors during walking, adapt the amount of support to the individual patient and eventually regaining their walking ability. In this project, we, together with the project partner (MOOG and Demcon) will redesign the LOPES for clinical use. The redesigned will be a totally new and stand out with respect to previously developed exoskeletons. This redesigned version of LOPES will be placed in two Dutch rehabilitation centers (Roessingh Rehabilitation Centre and Sint Maartenskliniek) beginning 2013, where extensive testing with acute patient will be performed.
To improve the efficacy of robot aided gait training, we want to tailor training programs to the subject’s characteristics. In this respect it is of crucial importance that these characteristics can be quantified objectively. LOPES can be used to obtain several characteristics, among which the joint stiffness. Within the European project Everyon we have developed measurement protocols to assess this joint stiffness (and other components of the joint impedance).
Within the VENI project, we are going to combine robot aided gait training with non invasive brain stimulation to further stimulate cortical plasticity and improve functional outcome. In this project we will use innovative techniques to assess this cortical plasticity.
Apart of these mainly clinical application we will also use LOPES in more fundamental studies to the dynamics of walking and motor adaptation in the lower extremities.
Getting involved
Are you a master or bachelor student and would you like to do a research project on LOPES, please send us (e.h.f.vanasseldonk@utwente.nl or h.vanderkooij@utwente.nl) your CV and a short motivation. We are seeking for excellent students who want to work on (re)designing LOPES (improvements or extension), control approaches, motor adaptation experiments, quantifying cortical plasticity, development of assessment protocols or clinical evaluations (training).
Media & publications
In the press
Television
- LOPES in BBC news (25-9-11)
- LOPES in the SBS6 program ‘Hart van Nederland’ (3-10-2011)
- LOPES on Reuters (1-12-2011)
- LOPES in the NTR-VPRO program ‘Labyrinth’ (5-4-2011)
- LOPES in Vara’s Nieuwslicht
Radio
Written media
- LOPES in Fysiopraxis (sept 2011)
- LOPES in Twentsche Courant Tubantia (17-10-09)
- LOPES in NRC handelsblad (29-09-2009)
- LOPES in Twentsche Courant Tubantia (18-09-09)
- LOPES in De Volkskrant (13-06-2009)
- LOPES in the march issue of O&P Edge
- LOPES in Metro (16-12-2008)
- LOPES in Twentsche Courant Turbantia (13-04-2008)
- LOPES in technisch weekblad
- PhD project of Jan Veneman in Bits&Chips (07-12-2007)
Multimedia
August 2006
- Walking in Lopes with minimal resistance (zero impedance)
- Running in Lopes with minimal resistance (zero impedance)
September 2008
- Selective support of step height in healthy subject with different virtual stiffness
- Selective support of step height in chronic stroke survivor
- Use of LOPES in soccer training
2011
- Video made for Innovatieplatform Twente2012
- Lopes in corporate movie University of Twente
- Simulation of virtual exoskeleton
Publications
International journals
van Asseldonk E, van der Kooij H Robot-aided gait training with LOPES. In: Neurorehabilitation Technology (Dietz V, Nef T, Rymer WZ, eds), pp 379–396. London: Springer-Verslag, 2012.
Ronsse R, Lenzi T, Vitiello N, Koopman B, van Asseldonk E, De Rossi SMM, van den Kieboom J, van der Kooij H, Carrozza MC, Ijspeert AJ Oscillator-based assistance of cyclical movements: model-based and model-free approaches. Med Biol Eng Comput 49:1173–1185, 2011.
de Rossi SMM, Vitiello N, Lenzi T, Ronsse R, Koopman B, Persichetti A, Vecchi F, Ijspeert AJ, van der Kooij H, Carrozza MC. Sensing pressure distribution on a lower-limb exoskeleton physical human-machine interface. Sensors 11:207–227, 2011..
van Asseldonk EH, Wessels M, Stienen AH, van der Helm FC, and van der Kooij H. Influence of haptic guidance in learning a novel visuomotor task. Journal of physiology, Paris 103: 276-285, 2009.
Vallery H, Van Asseldonk EHF, Buss M, and Van der Kooij H. Reference Trajectory Generation for Rehabilitation Robots: Complementary Limb Motion Estimation. IEEE Trans Neural Syst Rehabil Eng 17: 23-30, 2009
Vallery H, Veneman J, Van Asseldonk E, Ekkelenkamp R, Buss M, and Van der Kooij H. Compliant Actuation of Rehabilitation Robots: Advantages and Limitations. IEEE Robotics & Automation Magazine 15: 60-69, 2008b.
Veneman JF, Menger J, Van Asseldonk EHF, Van der Helm FCT, and Van der Kooij H. Fixating the pelvis in the horizontal plane affects gait characteristics. Gait Posture 28: 157-163, 2008.
Van Asseldonk EHF, Veneman JF, Ekkelenkamp R, Buurke JH, Van der Helm FCT, and Van der kooij H. The effects on kinematics and muscle activity of walking in a robotic gait trainer during zero-force control. IEEE Trans Neural Syst Rehabil Eng 16: 360 - 370 2008.
Veneman JF, Kruidhof R, Hekman EEG, Ekkelenkamp R, Van Asseldonk EHF, and Van der Kooij H. Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation. IEEE Trans Neural Syst Rehabil Eng 15: 379-386, 2007.
Veneman JF, Ekkelenkamp R, Kruidhof R, van der Helm FCT, and van der Kooij H. A Series Elastic- and Bowden-Cable-Based Actuation System for Use as Torque Actuator in Exoskeleton-Type Robots. The International Journal of Robotics Research 25: 261-281, 2006.
Conference Proceedings
Koopman B, van Asseldonk EHF, van der Kooij H, van Dijk W, Ronsse R Rendering potential wearable robot designs with the LOPES gait trainer. In: Proceedings of ICORR 2011 - IEEE International Conference on Rehabilitation Robotics. Zurich: 2011.
Ronsse R, Koopman B, Vitiello N, Lenzi T, de Rossi SMM, van den Kieboom J, van Asseldonk E, Carrozza MC, van der Kooij H, Ijspeert AJ R Oscillator-based walking assistance: A model-free approach. In: Proceedings of ICORR 2011 - IEEE International Conference on Rehabilitation Robotics. Zurich: 2011.
Wang L, van Asseldonk EHF, van der Kooij H Model predictive control-based gait pattern generation for wearable exoskeletons. In: Proceedings of ICORR 2011 - IEEE International Conference on Rehabilitation Robotics. Zurich: 2011.
van Asseldonk EHF, Koopman B, van der Kooij H. Locomotor adaptation and retention to gradual and sudden dynamic perturbations. In: Proceedings of ICORR 2011 - IEEE International Conference on Rehabilitation Robotics. Zurich: 2011.
Meuleman J, Terpstra W, van Asseldonk EHF, van der Kooij H. Effect of added inertia on the pelvis on gait. In: Proceedings of ICORR 2011 - IEEE International Conference on Rehabilitation Robotics. Zurich: 2011.
Koopman B, van Asseldonk EHF, van der Kooij H (2010) In vivo measurement of human knee and hip dynamics using MIMO system identification. In: Proceedings of EMBS 2010 - 32th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Buenos Aires: 2010, pp 3426–3429.
van Asseldonk EHF, Koopman B, Buurke JH, Simons CD, and van der Kooij H. Selective and adaptive robotic support of foot clearance for training stroke survivors with stiff knee gait. In: Proceedings of ICORR 2009 - IEEE International Conference on Rehabilitation Robotics Kyoto: 2009, p. 602-607.
Van der Kooij H, Koopman B, and Van Asseldonk EHF. Body weight support by virtual model control of a impedance controlled exoskeleton (LOPES) for gait training. In: Proceedings of EMBS 2008 - 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Vancouver: 2008, p. 1969 - 1972.
Veneman JF, Van Asseldonk EHF, Ekkelenkamp R, van der Helm FCT, and van der Kooij H. Evaluation of the effect on walking of balance-related degrees of freedom in a robotic gait training device. In: Proceedings of ICORR 2007 - IEEE International Conference on Rehabilitation Robotics Noordwijk: 2007, p. 868-875.
Van Asseldonk EHF, Ekkelenkamp R, Veneman JF, van der Helm FCT, and van der Kooij H. Selective control of a subtask of walking in a robotic gait trainer(LOPES). In: Proceedings of ICORR 2007 - IEEE International Conference on Rehabilitation Robotics Noordwijk: 2007, p. 841-848.
Vallery H, Ekkelenkamp R, van der Kooij H, and Buss M. Passive and accurate torque control of series elastic actuators. In: Proceedings of IROS 2007 - IEEE/RSJ International Conference on Intelligent Robots and Systems 2007b, p. 3534-3538.
Vallery H, Ekkelenkamp R, Buss M, and van der Kooij H. Complementary Limb Motion Estimation based on Interjoint Coordination: Experimental Evaluation. In: Proceedings of ICORR 2007 - IEEE International Conference on Rehabilitation Robotics 2007a, p. 798-803.
Ekkelenkamp R, Veneman J, and van der Kooij H. LOPES: a lower extremity powered exoskeleton. In: Proceedings of ICRA 2007 - IEEE International Conference on Robotics and Automation, 2007 p. 3132-3133.
Van der kooij H, Veneman J, and Ekkelenkamp R. Design of a compliantly actuated exo-skeleton for an impedance controlled gait trainer robot. In: Proceedings of EMBS 2006 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. New York City, USA: 2006.
Ekkelenkamp R, Veneman J, and van der Kooij H. LOPES: selective control of gait functions during the gait rehabilitation of CVA patients. In: Proceedings of ICORR 2005 - IEEE International Conference on Rehabilitation Robotics. Chicago: 2005, p. 361-364.
Veneman JF, Ekkelenkamp R, Kruidhof R, van der Helm FCT, and van der Kooij H. Design of a series elastic- and Bowden cable-based actuation system for use as torque-actuator in exoskeleton-type training. In: Proceedings of ICORR 2005 - IEEE International Conference on Rehabilitation Robotics. Chicago: 2005, p. 496-499.
Congress posters
Collaboration
Other faculties at the University of Twente
- Prof. dr.ir. Stefano Stramigioli (Control engineering, EWI)
- Prof.dr.ir. Peter Veltink (Biomedical signals and systems, EWI)
Dutch universities
Other
International
Companies
Acknowledgements
Past funding
- NWO (Verniewingsimpuls 2001),
- KNGF (Royal Dutch Society for Physiotherapy),
- MIRA
Current Funding
- Dutch Ministry of Economic affairs and Province of Overijssel (Pieken In de Delta, Oost-Nederland)
- European Commission (Seventh Framework Programme, Evryon, MindWalker)
- NWO (VENI)