Completed Ph.D. thesis
1. Generation of 3D building models
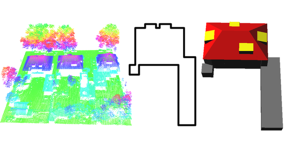
We present a building reconstruction approach, which is based on a target graph matching algorithm as an intermediate step to relate laser data with building models. Establishing this relation is important for adding building knowledge to the data. Our targets are topological representations of the most common roof structures which are stored in a database. Topological relations between roof segments are represented in a building roof graph. This graph is matched with the graphs from the target database. Matching results describe which target objects appear topologically in the data.
For the geometric reconstruction, we present two approaches that vary in the amount of information they take from the data. The first, more data-driven approach starts with laser data features that have been matched with target models. The second, more model-driven approach reconstructs parameterized building models.



Publication: Elberink, S.O.; Vosselman, G. Building Reconstruction by Target Based Graph Matching on Incomplete Laser Data: Analysis and Limitations. Sensors 2009, 9, 6101-6118. https://doi.org/10.3390/s90806101
2. 3D building reconstruction from airborne LiDAR data
Ph.D. thesis of Biao Xiong: https://doi.org/10.1016/j.isprsjprs.2015.01.002
https://webapps.itc.utwente.nl/librarywww/papers_2014/phd/xiong.pdf
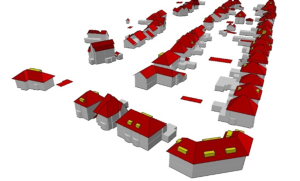
In this thesis, new methods on 3D building reconstruction from airborne lidar data are introduced. Two main contributions are (1) the use of flexible building primitives to solve the problem that many complex buildings cannot be represented by the state-of-the-art building primitives, and (2) a graph edit dictionary has been introduced to automatically correct errors in roof topology graphs.
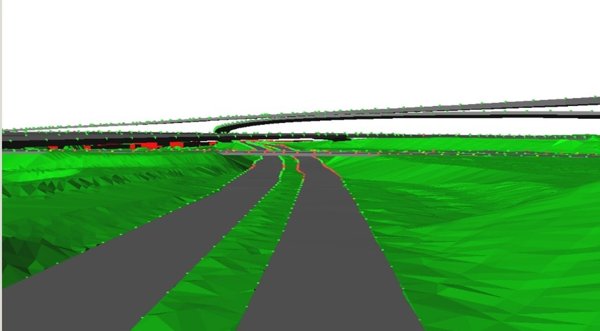
3. Producing 3D models of the railway environment
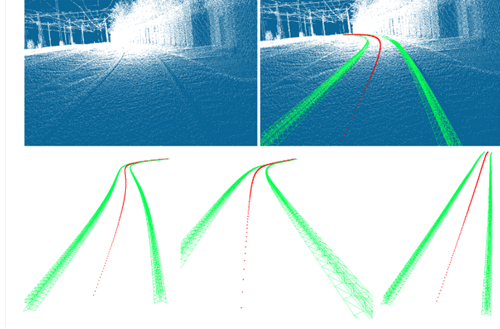
The aim of this research was to analyze whether we can accurately and automatically determine centerlines of rail tracks, even if the platform is at another rail track. We have shown that it is indeed possible to generate centerlines as long as rail tracks can be identified. Two approaches have been presented in this paper: the first determines the center position directly between points of a pair of rails. The second approach models the rail track by fitting a parametric model to the extracted rail points.
Publication: Oude Elberink, S. J., & Khoshelham, K. (2015). Automatic extraction of railroad centrelines from mobile laser scanning data. Remote sensing, 7(5), 5565-5583. https://doi.org/10.3390/rs70505565
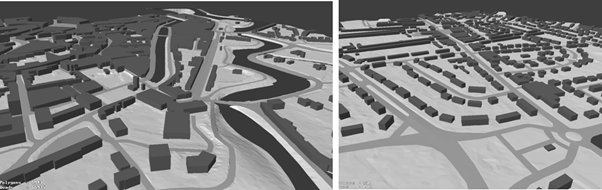
3D Road objects
Roads and buildings are of high importance in 3D city models as they are two major topographic classes in the urban environment. To accomplish an automated approach, existing 2D topographic maps are upgraded to 3D using airborne laser scanner data. When examining 3D road objects, we can expect that multiple road objects cross at a certain location. Complex situations demand for knowledge to guide the automatic reconstruction. This knowledge is used in the fusion procedure to constrain the topological and geometrical properties of the reconstructed 3D model. Elevations of map points are determined by least squares plane fitting through a selection of neighbouring laser points.
Publication: Oude Elberink, S. J., & Vosselman, G. (2009). 3D information extraction from laser point clouds covering complex road junctions. Photogrammetric record, 24(125), 23-36. https://doi.org/10.1111/j.1477-9730.2008.00516.x
Producing national 3D city- and landscape models
This research describes the generation and dissemination of a national three-dimensional (3D) dataset representing the virtual and landscape model. The 3D model is produced automatically by fusing a two-dimensional (2D) national object-oriented database describing the physical landscape and the national high-resolution height model of the Netherlands. Semantic constraints are introduced to correctly model 3D objects. Three areas from different regions in the Netherlands have been processed in order to develop, improve and test the automatic generation of a national 3D city and landscape model. Specific attention has been paid to exceptional cases that may occur in a nationwide dataset. Based on the test results, the Kadaster, the national agency in the Netherlands responsible for the production of nation wide geo-information, decided that it is feasible to produce a national 3D city and landscape model that fulfills the specifications that were defined as part of this study.
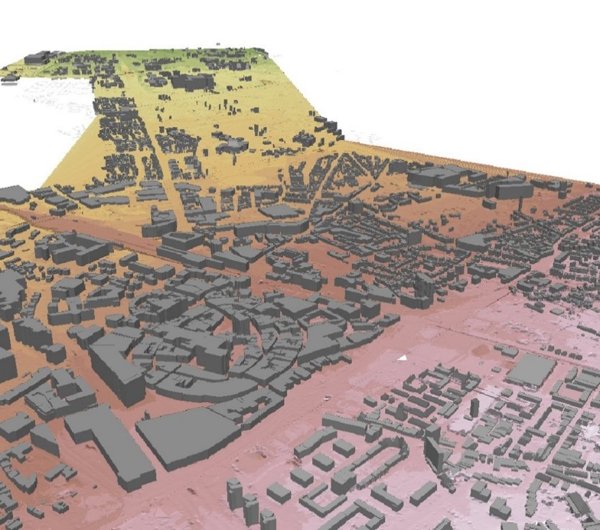
Publication: Elberink, S. O., Stoter, J., Ledoux, H., & Commandeur, T. (2013). Generation and dissemination of a national virtual 3D city and landscape model for the Netherlands. Photogrammetric engineering & remote sensing, 79(2), 147-158. https://doi.org/10.14358/PERS.79.2.147
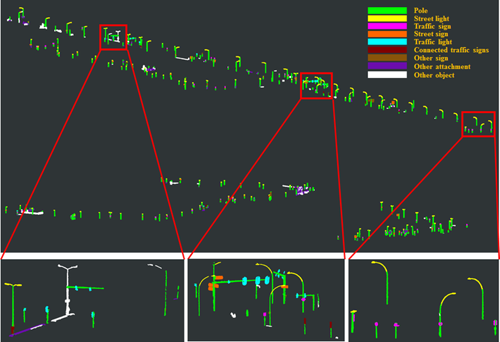
Infrastructural asset detection and classification
In this research, we first decompose a point cloud of detected road furniture to separate poles and their attachments. Secondly, we generate features on attachments, poles and between attachments and poles in order to interpret road furniture.
Publication:
Li, F.; Lehtomäki, M.; Oude Elberink, S.; Vosselman, G.; Kukko, A.; Puttonen, E.; Chen, Y.; Hyyppä, J. Semantic segmentation of road furniture in mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2019, 154, 98–113, https://doi.org/10.1016/j.isprsjprs.2019.06.001
4. Creating 3D maps with a backpack
https://www.itc.nl/news/2021/11/277940/creating-3d-maps-with-a-backpack

Related paper: Karam, S., Lehtola, V., & Vosselman, G. (2021). Simple loop closing for continuous 6DOF LIDAR&IMU graph SLAM with planar features for indoor environments. ISPRS Journal of Photogrammetry and Remote Sensing, 181, 413-426.